
Действие силы на материальную точку можно охарактеризовать не только с помощью изменения скорости движения тела, но при помощи величины перемещения, которое совершает рассматриваемое тело под действием силы ($\bar{F}$).
Элементарная работа
Элментарная реабота $(\delta A)$ некоторой силы $\bar{F}$ определяется как скалярное произведение:
$$\delta A=\bar{F} \cdot d \bar{r}=F \cdot d s \cdot \cos \alpha(2)$$$\bar{r}$ радиус – вектор точки, к которой приложена сила, $\bar{r}$ — элементарное перемещение точки по траектории, $\alpha$ – угол между векторами $d s=|d \bar{r}|$ и $d \bar{r}$. Если $\alpha$ является тупым углом работа меньше нуля, если угол $\alpha$ острый, то работа положительная, при $\alpha=\frac{\pi}{2} \delta A=0$
В декартовых координатах формула (2) имеет вид:
$$\delta A=F_{x} d x+F_{y} d y+F_{z} d z(3)$$где Fx,Fy,Fz – проекции вектора $\bar{F}$ на декартовы оси.
При рассмотрении работы силы, приложенной к материальной точке можно использовать формулу:
где $\bar{v}$ – скорость материальной точки,
$\bar{p}$ – импульс материальной точки. {4}$$
{4}$$
Ответ. n=4
Читать дальше: Формула силы Ампера.
Физическая работа — урок. Физика, 8 класс.
Совершённая работа равна изменению энергии, потраченной на совершение работы.
Величину работы можно определить, вычитая из конечного значения энергии начальное значение энергии.
A=Eконеч.−Eнач.,или A=ΔE, где A — работа (Дж); E — энергия (Дж).
Работу, как и энергию, измеряют в джоулях (Дж).
Если энергия тела увеличивается, тогда общая совершённая работа является положительной.
Пример:
Когда автомобиль начинает двигаться, его кинетическая энергия увеличивается. Значит, двигатель автомобиля совершает положительную работу.
Если энергия тела уменьшается, тогда общая совершённая работа является отрицательной.
Пример:
Когда автомобиль свободно катится по горизонтальной поверхности, его скорость и кинетическая энергия уменьшаются. Значит, сила сопротивления совершает отрицательную работу.
Значит, сила сопротивления совершает отрицательную работу.
В физике рассматривают физическую работу, которая связана с перемещением тел.
Если при прямолинейном движении на тело действует неизменная сила, направленная в сторону движения тела, тогда работа, произведённая приложенной силой, равна произведению величины силы на величину проделанного перемещения.
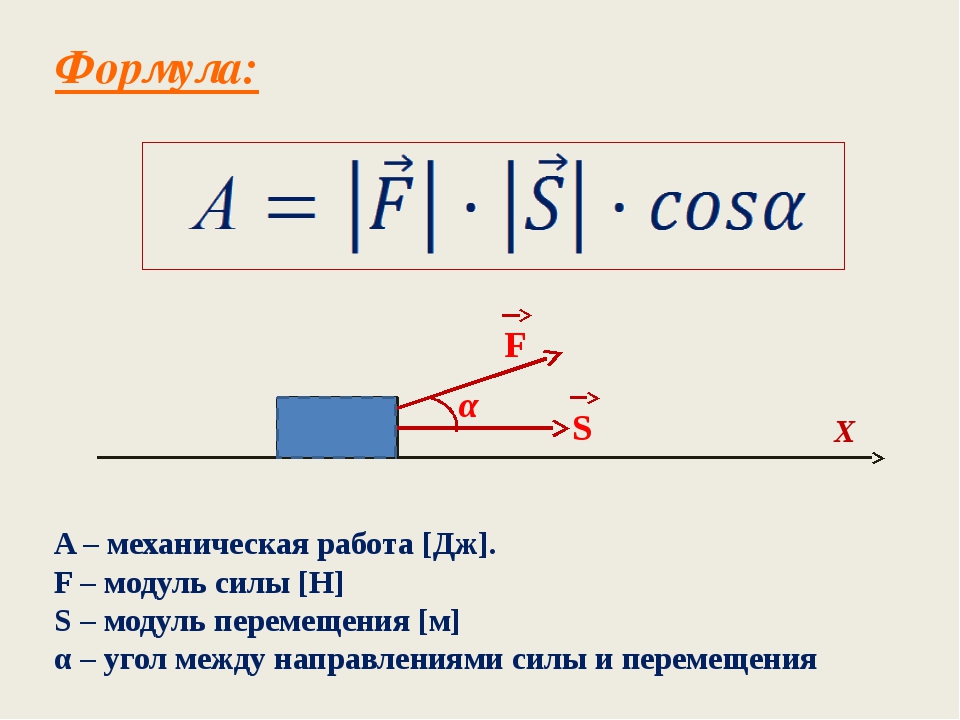
Если к телу приложена сила под вертикальным углом к направлению движения тела, как это показано на рисунке, тогда величина совершённой работы зависит от:
1) величины приложенной силы (F), которая совершает работу;
2) расстояния (l), на которое перемещается тело;
3) угла \(α\) между направлением действия силы и направлением движения тела.
Работа определяется по формуле: A=F⋅l⋅cosα.
Рис. \(1\). Под углом
Обрати внимание!
Если сила направлена параллельно направлению перемещения, тогда угол \(α = 0\), а \(косинус\) угла \(α\) равен \(1\). В этом случае формула упрощается: A=F⋅l.
В этом случае формула упрощается: A=F⋅l.
Если проделанный путь является прямолинейным, тогда вместо пути \(l\) можно использовать перемещение (s).
В этом случае формула для расчёта работы приобретает такой вид: A=F⋅s.
На трёх рисунках изображены случаи, когда направление силы и направление движения тела совпадают.
1) Действие силы и направление движения тела направлены горизонтально. Например, автомобиль едет по прямому пути, и сила тяги автомобиля приложена в том же направлении.
Рис. \(2\). Параллельно
2) Действие силы и направление движения тела направлены под одинаковым углом наклона по отношению к горизонту. Например, автомобиль едет в гору.
Рис.\(3\). Движение «в гору»
3) Действие силы и направление движения тела направлены вертикально. Например, груз поднимается вверх, и сила упругости троса тоже направлена вверх. В этом случае величину совершённой работы можно рассчитать также по формуле A=m⋅g⋅h, где
В этом случае величину совершённой работы можно рассчитать также по формуле A=m⋅g⋅h, где
(m) — масса тела, (g) — ускорение свободного падения,
(h) — высота подъёма тела над поверхностью земли.
Рис. \(4\). Движение вверх
Обрати внимание!
Если направление действия силы противоположно направлению движения, тогда совершаемая этой силой работа отрицательна.
Работа отрицательна, так как функция \(косинус\) в интервале значений угла \(90° — 180°\) является отрицательной.
Таким образом, любая работа, совершённая силой трения или сопротивления, является отрицательной.
Пример:
Когда автомобиль едет с равномерной скоростью по прямой дороге, как это показано на рисунке, работа силы тяги автомобиля является положительной, а работа силы сопротивления равна по величине, но является отрицательной. В результате этого кинетическая и потенциальная энергия автомобиля остаются неизменными.
Если сила направлена прямо противоположно направлению движения, тогда работу вычисляют по формуле: A=−F⋅l.
Рис. \(5\). Автомобиль
Источники:
Рис. 1. Под углом. © ЯКласс.
Рис. 2. Параллельно. © ЯКласс.
Рис. 3. Движение «в гору». © ЯКласс.
Рис. 4. Движение вверх. © ЯКласс.
Рис. 5. Автомобиль. © ЯКласс.
Коэффициент полезного действия (кпд) — формулы, обозначение, расчет
Статья находится на проверке у методистов Skysmart.
Если вы заметили ошибку, сообщите об этом в онлайн-чат
(в правом нижнем углу экрана).
КПД: понятие коэффициента полезного действия
Представьте, что вы пришли на работу в офис, выпили кофе, поболтали с коллегами, посмотрели в окно, пообедали, еще посмотрели в окно — вот и день прошел. Если вы не сделали ни одного дела по работе, то можно считать, что ваш коэффициент полезного действия равен нулю.
В обратной ситуации, когда вы сделали все запланированное — КПД равен 100%.
По сути, КПД — это процент полезной работы от работы затраченной.
Вычисляется по формуле:
|
Формула КПД η = (Aполезная/Aзатраченная) * 100% η — коэффициент полезного действия [%] Aполезная — полезная работа [Дж] Aзатраченная — затраченная работа [Дж] |
Есть такое философское эссе Альбера Камю «Миф о Сизифе». Оно основано на легенде о неком Сизифе, который был наказан за обман. Его приговорили после смерти вечно таскать огромный булыжник вверх на гору, откуда этот булыжник скатывался, после чего Сизиф тащил его обратно в гору. То есть он делал совершенно бесполезное дело с нулевым КПД. Есть даже выражение «Сизифов труд», которое описывает какое-либо бесполезное действие.
Давайте пофантазируем и представим, что Сизифа помиловали и камень с горы не скатился. 2
2
Затраченная работа здесь — это механическая работа Сизифа. Механическая работа зависит от приложенной силы и пути, на протяжении которого эта сила была приложена.
|
Механическая работа А = FS A — механическая работа [Дж] F — приложенная сила [Н] S — путь [м] |
|
И как же достоверно определить, какая работа полезная, а какая затраченная? Все очень просто! Задаем два вопроса:
В примере выше процесс происходит ради того, чтобы тело поднялось на какую-то высоту, а значит — приобрело потенциальную энергию (для физики это синонимы). |
 Происходит процесс за счет энергии, затраченной Сизифом — вот и затраченная работа.
Происходит процесс за счет энергии, затраченной Сизифом — вот и затраченная работа.КПД в механике
Главный секрет заключается в том, что эта формула подойдет для всех видов КПД.
Запоминаем!
|
КПД η = (Aполезная/Aзатраченная) * 100% η — коэффициент полезного действия [%] Aполезная — полезная работа [Дж] Aзатраченная — затраченная работа [Дж] |
Дальше мы просто заменяем полезную и затраченную работы на те величины, которые ими являются. 2
2
За счет чего процесс происходит?
За счет мальчика, он же тянет санки. Значит затраченная работа равна механической работе|
Механическая работа А = FS A — механическая работа [Дж] F — приложенная сила [Н] S — путь [м] |
Заменим формуле КПД полезную работу на потенциальную энергию, а затраченную — на механическую работу:
η = Eп/A * 100% = mgh/FS * 100%
Подставим значения:
η = 4*9,8*2/15*12 * 100% = 78,4/180 * 100% ≃ 43,6 %
Ответ: КПД процесса приблизительно равен 43,6 %
Онлайн-курсы физики в Skysmart не менее увлекательны, чем наши статьи!
КПД в термодинамике
В термодинамике КПД — очень важная величина.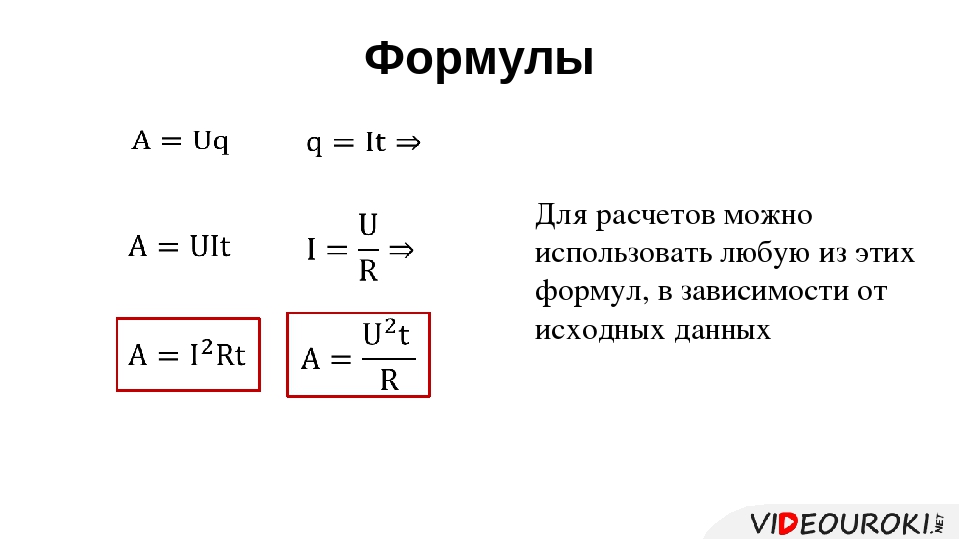
- Тепловой двигатель (машина) – это устройство, которое совершает механическую работу циклически за счет энергии, поступающей к нему в ходе теплопередачи.
Схема теплового двигателя выглядит так:
У теплового двигателя обязательно есть нагреватель, который (не может быть!) нагревает рабочее тело, передавая ему количество теплоты Q1 или Qнагревателя (оба варианта верны, это зависит лишь от учебника, в котором вы нашли формулу).
- Рабочее тело — это тело, на котором завязан процесс (чаще всего это газ). Оно расширяется при подводе к нему теплоты и сжимается при охлаждении. Часть переданного Q1 уходит на механическую работу A. Из-за этого производится движение.
Оставшееся количество теплоты Q2 или Qхолодильника отводится к холодильнику, после чего возвращается к нагревателю и процесс повторяется.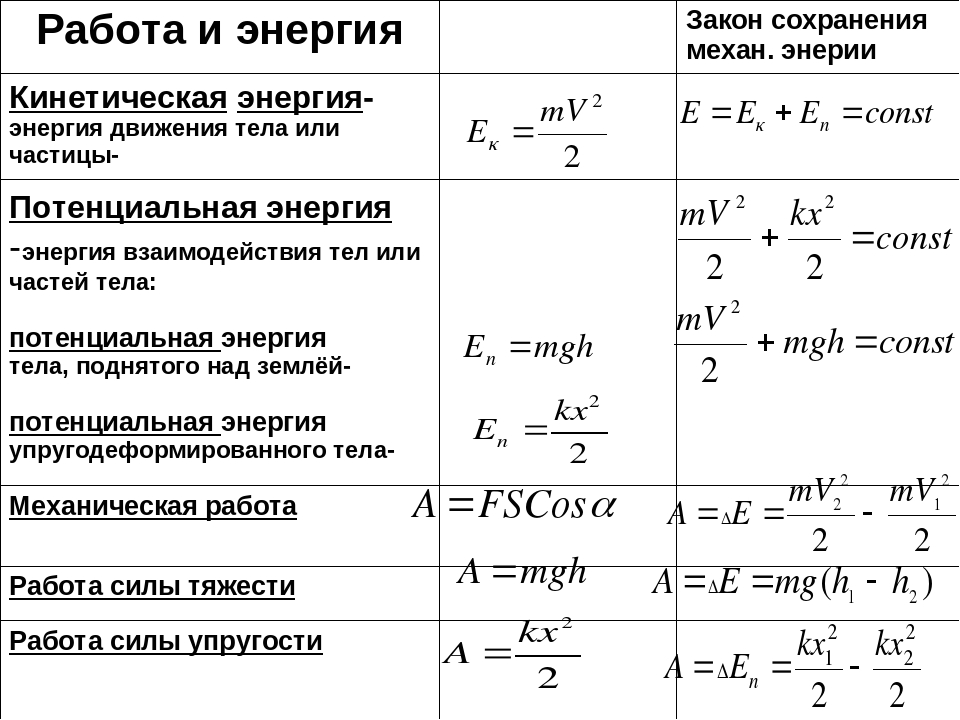
КПД такой тепловой машины будет равен:
|
КПД тепловой машины η = (Aполезная/Qнагревателя) * 100% η — коэффициент полезного действия [%] Aполезная — полезная работа (механическая) [Дж] Qнагревателя — количество теплоты, полученное от нагревателя[Дж] |
Если мы выразим полезную (механическую) работу через Qнагревателя и Qхолодильника, мы получим:
A = Qнагревателя — Qхолодильника.
Подставим в числитель и получим такой вариант формулы.
|
КПД тепловой машины η = Qнагревателя — Qхолодильника/Qнагревателя * 100% η — коэффициент полезного действия [%] Qнагревателя — количество теплоты, полученное от нагревателя[Дж] Qхолодильника — количество теплоты, отданное холодильнику [Дж] |
|
А возможно ли создать тепловую машину, которая будет работать только за счет охлаждения одного тела? Точно нет! Если у нас не будет нагревателя, то просто нечего будет передавать на механическую работу. Поскольку свидетельств такого процесса в мире не существует, то мы можем сделать вывод: вечный двигатель невозможен. Это второе начало термодинамики. |
 Любой такой процесс — когда энергия не приходит из ниоткуда — означал бы возможность существования вечного двигателя.
Любой такой процесс — когда энергия не приходит из ниоткуда — означал бы возможность существования вечного двигателя.Запишем его, чтобы не забыть:
Невозможно создать периодическую тепловую машину за счет охлаждения одного тела без изменений в других телах.
Задача
Найти КПД тепловой машины, если рабочее тело получило от нагревателя 20кДж, а отдало холодильнику 10 кДж.
Решение:
Возьмем формулу для расчета КПД:
η = Qнагревателя — Qхолодильника/Qнагревателя * 100%
Подставим значения:
η = 20 — 10/20 *100% = 50%
Ответ: КПД тепловой машины равен 50%
Идеальная тепловая машина: цикл Карно
Давайте еще чуть-чуть пофантазируем: какая она — идеальная тепловая машина.
На самом деле понятие «идеальная тепловая машина» уже существует. Это тепловая машина, у которой в качестве рабочего тела взят идеальный газ. Такая тепловая машина работает по циклу Карно. Зависимость давления от объема в этом цикле выглядит следующим образом
А КПД для цикла Карно можно найти через температуры нагревателя и холодильника.
|
КПД цикла Карно η = Tнагревателя — Tхолодильника /Tнагревателя *100% η — коэффициент полезного действия [%] Tнагревателя — температура нагревателя[Дж] Tхолодильника — температура холодильника [Дж] |
КПД в электродинамике
Мы каждый день пользуемся различными электронными устройствами: от чайника до смартфона, от компьютера до робота-пылесоса — и у каждого устройства можно определить, насколько оно эффективно выполняет задачу, для которой оно предназначено, просто посчитав КПД.
Вспомним формулу:
|
КПД η = Aполезная/Aзатраченная *100% η — коэффициент полезного действия [%] Aполезная — полезная работа [Дж] Aзатраченная — затраченная работа [Дж] |
Для электрических цепей тоже есть нюансы. Давайте разбираться на примере задачи.
Задачка, чтобы разобраться
Найти КПД электрического чайника, если вода в нем приобрела 22176 Дж тепла за 2 минуты, напряжение в сети — 220 В, а сила тока в чайнике 1,4 А.
Решение:
Цель электрического чайника — вскипятить воду. То есть его полезная работа — это количество теплоты, которое пошло на нагревание воды. Оно нам известно, но формулу вспомнить все равно полезно 😉
|
Количество теплоты, затраченное на нагревание Q = cm(tконечная-tначальная) Q — количество теплоты [Дж] c — удельная теплоемкость вещества [Дж/кг*˚C] m — масса [кг] tконечная — конечная температура [˚C] tначальная — начальная температура [˚C] |
Работает чайник, потому что в розетку подключен. 2)/R *t = UIt
2)/R *t = UIt
A — работа электрического тока [Дж]
I — сила тока [А]
U — напряжение [В]
R — сопротивление [Ом]
t — время [c]
То есть в данном случае формула КПД будет иметь вид:
η = Q/A *100% = Q/UIt *100%
Переводим минуты в секунды — 2 минуты = 120 секунд. Теперь намм известны все значения, поэтому подставим их:
η = 22176/220*1,4*120 *100% = 60%
Ответ: КПД чайника равен 60%.
Давайте выведем еще одну формулу для КПД, которая часто пригождается для электрических цепей, но применима ко всему. Для этого нужна формула работы через мощность:
|
Работа электрического тока A = Pt A — работа электрического тока [Дж] P — мощность [Вт] t — время [c] |
Подставим эту формулу в числитель и в знаменатель, учитывая, что мощность разная — полезная и затраченная. Поскольку мы всегда говорим об одном процессе, то есть полезная и затраченная работа ограничены одним и тем же промежутком времени, можно сократить время и получить формулу КПД через мощность.
Поскольку мы всегда говорим об одном процессе, то есть полезная и затраченная работа ограничены одним и тем же промежутком времени, можно сократить время и получить формулу КПД через мощность.
|
КПД η = Pполезная/Pзатраченная *100% η — коэффициент полезного действия [%] Pполезная — полезная мощность [Дж] Pзатраченная — затраченная мощность [Дж] |
Презентація «Механічна робота. Одиниці роботи. Потужність та одиниці її вимірювання»
Про матеріал
Презентація «Механічна робота. Одиниці роботи. Потужність та одиниці її вимірювання»
Мета уроку:
Навчальна: сформувати поняття роботи та потужності і їх одиниць; навчити учнів обчислювати роботу та потужність; продовжити формування наукового стилю мислення забезпечити ознайомлення з працями учених, а саме Д. Джоуля.
Джоуля.
розвивальна:
розвивати спостережливість, вміння аналізувати, інтерес до фізики.
виховна:
формувати навички колективної роботи в поєднанні з розвитком індивідуальних творчих здібностей учнів; сприяти вихованню у учнів таких якостей особистості, як організованість, дисциплінованість, уважність спостережливість.
Перегляд файлу
Зміст слайдів
Номер слайду 1
«Фізика наскільки серйозна наука, що гріх не скористатися нагодою зробити її трішечки цікавішою». Б. Паскаля
Номер слайду 2
Сила позначається літерою РСила – це фізична величина, яка є мірою дії одного тіла на інше(мірою взаємодії тіл). Одиниці сили см. Шлях позначається літерою S, 𝒍. Шлях розраховується за формулою 𝒍=Ʋt. Одиниця шляху в СІ – кг.
Номер слайду 3
Сила позначається літерою РСила – це фізична величина, яка є мірою дії одного тіла на інше(мірою взаємодії тіл). Одиниці сили см. Шлях позначається літерою S, 𝒍. Шлях розраховується за формулою 𝒍=Ʋt. Одиниця шляху в СІ – кг.
Шлях розраховується за формулою 𝒍=Ʋt. Одиниця шляху в СІ – кг.
Номер слайду 4
Механічна робота. Одиниці роботи. Потужність та одиниці її вимірювання.
Номер слайду 5
Номер слайду 6
Механічна робота – це фізична величина, яка характеризує зміну положення тіла під дією сили і дорівнює добутку сили на шлях, подоланий тілом у напрямку цієї сили.
Номер слайду 7
Робота позначається літерою А.
Номер слайду 8
Роботу можна розрахувати за формулою: А=F *𝒍де А – механічна робота;F – значення сили, що діє на тіло; 𝒍 – шлях, який подолало тіло, рухаючись у напрямку цієї сили.
Номер слайду 9
Одиниці роботи в системі СІ-Дж.(Джоуль)СІ: [A]=Дж. Названа так на честь англійського вченого Джеймса Джоуля.
Номер слайду 10
Експериментальне завдання
Номер слайду 11
Механічна робота в даному випадку розраховується за формулою: А=F *𝒍Робота є додатною. А>0.
А>0.
Номер слайду 12
В давному випадку механічна робота розраховується за формулою: А= — F *𝒍
Номер слайду 13
В давному випадку механічна робота А=0.
Номер слайду 14
Номер слайду 15
Чим вони відрізняються автомобілі?потужність
Номер слайду 16
Хто швидше буде копати траншею?Хто швидше зоре гектар землі?
Номер слайду 17
Потужність- це фізична величина, яка характеризує швидкість роботи і дорівнює відношенню виконаної роботи до часу, за який цю роботу виконано.
Номер слайду 18
Потужність позначається літерою N.
Номер слайду 19
Розраховується за формулою: N =Atде N –потужність, A – робота, t – час виконання роботи.
Номер слайду 20
Одиниця потужності в СІ- ват.[N]=Вт. Ця одиниця дістала свою назву на честь британського інженера та винахідника-механіка Джеймса Ватта.
Номер слайду 21
Джеймс Ватт користувався іншими одиницями, йому належить ідея вимірювати механічну потужність у “кінських силах”. 1 к.с.=735 Вт.
1 к.с.=735 Вт.
Номер слайду 22
Задача. Скільки часу повинен працювати двигун потужністю 25 00 Вт. Щоб виконати роботу 36000 Дж.
Номер слайду 23
Механічна робота позначається А. Формула механічної роботи А = Fl. Умови виконання роботи тіло рухається під дією сили. Одиниця роботи 1 Дж. Одиниця роботи названа на честь англійського вченого Джоуля.
Номер слайду 24
Чи виконується робота в таких випадках: дівчина грає на піаніно? Ні. Людина стоїть з мішком зерна на спині Ні. Робітник підпирає плечем двері ні. Вода тисне на стінку посудин ні.
Номер слайду 25
Фізична величина, яка чисельно дорівнюєвідношенню роботи до часу, протягом якого вона виконана, називається потужністю. Потужність позначається буквою N. Формула потужності N = A / t. Одиниця потужності 1 Вт.
Номер слайду 26
Домашнє завдання: §30,31 Впр. 30, №4.5. Впр.31, №2.
Номер слайду 27
Урок фізики 8 класу «Робота й потужність електричного струму»
Робота і потужність електричного струму
Мета: з’ясувати поняття роботи й потужності електричного струму, про прилади для їх вимірювання; розвивати в учнів уміння встановлювати взаємозв’язки між фізичними величинами, явищами і процесами, виховувати працьовитість.
Тип уроку: комбінований урок.
Конспект
1. Організаційний момент.
2. Перевірка домашнього завдання.
3. Актуалізація опорних знань.
- Що таке електричний струм?
- Назвати споживачі електричного струму.
- Яка умова того, щоб струм виникав?
- Що називають електричною схемою?
- Що вам відомо про силу струму, електричну напругу і електричний опір?
4. Вивчення нової теми.
Мотивація навчальної діяльності – проблемне питання
Поняття електроенергії всім знайоме. А де береться вона???
В джерелі струму відбувається перетворення будь-якого виду енергії на електричну. В гальванічному елементі хімічна енергія перетворюється на електричну; в генераторах – відбувається перетворення механічної; в фотоелементах – світлової. В споживачах відбувається подальше перетворення енергії – електричної на теплову, механічну, хімічну, магнітну.
В споживачах відбувається подальше перетворення енергії – електричної на теплову, механічну, хімічну, магнітну.
Достатньо пригадати теплову, магнітну й хімічну дії струму, як стає зрозуміло, що електричний струм має енергію. Ці дії свідчать про те, що електрична енергія може перетворюватися в теплову, світлову, механічну енергії. А будь-яке перетворення енергії з одного виду в інший характеризується виникання роботи. Робота є мірою енергії. Робота електричного струму – фізична величина, що характеризує перетворення електричної енергії в інші види енергії.
Отже, електричний струм при проходженні на певній ділянці кола виконує роботу, яку можна підрахувати.
Запишіть тему уроку: «Робота і потужність електричного струму».
Пригадайте означення напруги.
, де А – робота, виконується при перенесенні заряджених частинок на певній ділянці кола;
q – заряд, що переноситься на цій ділянці; U – напруга на даній ділянці кола.
Очевидно, А =U.q. Щоб визначити роботу електричного струму на певній ділянці електричного кола, потрібно напругу на цій ділянці кола помножити на заряд, перенесений через неї.
Тепер пригадайте означення сили струму:
, звідки q= I.t, тому А= U I t .
Для визначення роботи електричного струму достатньо виміряти напругу, силу струму та час проходження струму.
Якщо U=1B, I=1A, t=1C, то маємо А=1 Дж. Тому 1 Дж = 1В.1А.1с=1В.А.c
Спробуйте проаналізувати формулу і дати тлумачення одиниці роботи джоуль.
Давайте проведемо математичні перетворення формули.
Проблемне питання
??? Якщо маємо фізичну величину, то як, чим її виміряти???
Правильно, лічильником. Принцип дії лічильника.
Під час проходження струму через лічильник починає обертатися алюмінієвий диск, швидкість обертання пропорційна добутку U I.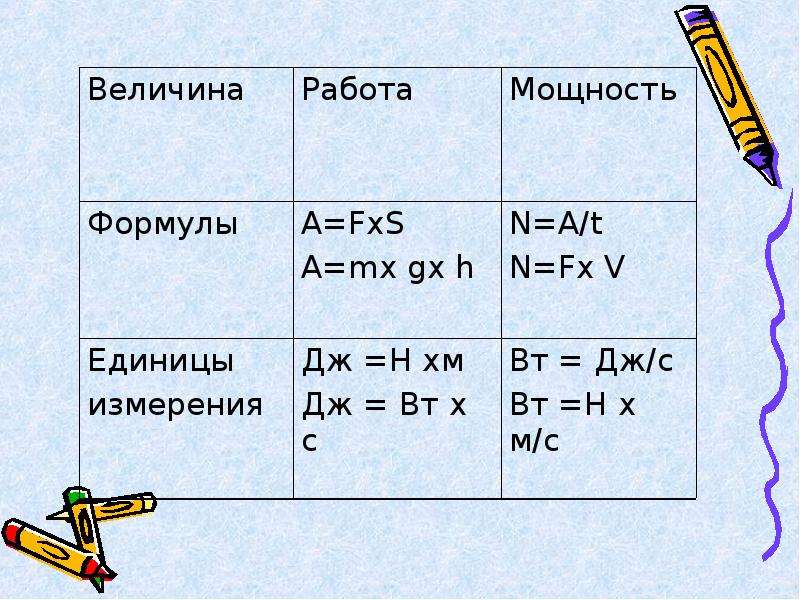 За кількістю обертів визначають використану електроенергію.
За кількістю обертів визначають використану електроенергію.
???А які одиниці вимірювання енергії в лічильниках???
кВт∙год
??? Чому???
Справа в тому, що робота тісно пов’язана з потужністю. Хто нагадає, що таке потужність?
Якщо йдеться про виконання роботи, варто згадати про швидкість її виконання, тобто про потужність. Пригадайте із 8 класу:
Спробуйте записати формулу й одиницю потужності електричного струму.
або Дайте визначення одиниці потужності 1 Вт: або
Потужності деяких приладів:
Введення нової одиниці вимірювання роботи електричного струму. З визначення потужності випливає :
1 Дж = 1 Вт·1 с = 1 Вт·с
1 кВт·год = 3 600 000 Дж = 3,6 МДж
Покази лічильника, що вимірює спожиту приладами у квартирі електричну енергію (роботу електричного струму), виражено саме в кіловат-годинах.
За використання електроенергії ми сплачуємо гроші. Для розрахунку коштів ми будемо застосовувати формулу:
Вартість = робота · тариф.
5. Закріплення знань
1. Потужність електричної лампи становить 60 Вт. Напруга на лампі складає 220 В. Обчисліть силу струму через лампу та роботу струму за 2 години.
2. Яка кількість теплоти виділилася за 20 хвилин роботи в електричній печі, якщо опір печі становить 40 Ом, а сила струму в її спіралі дорівнює 4 А?
6. Домашнє завдання.
Вчити § 33, впр 33 (1 – 4).
7. Підсумок уроку.
Інтерактивна вправа «Незакінчені речення».
Учитель формулює незакінчене речення і пропонує учням висловитися, щодо підсумку уроку, закінчуючи його. Кожний наступний учасник обговорення повинен починати свій виступ із запропонованої формули. Учні працюють з відкритими реченнями: «На сьогоднішньому уроці ми дізналися…», «На сьогоднішньому уроці найважливішим відкриттям для мене було…»
Фізика робота потужність сили.
 Механічна робота: визначення та формула
Механічна робота: визначення та формула
Кінь тягне віз з деякою силою, позначимо його Fтяги. Дідусь, що сидить на возі, тисне на неї з певною силою. Позначимо її Fтиск. Віз рухається вздовж напрямку сили тяги коня (вправо), а в напрямку сили тиску дідуся (вниз) віз не переміщається. Тому у фізиці кажуть, що Fтяги здійснює роботу над возом, а Fтиск не здійснює роботу над возом.
Отже, робота сили над тілом або механічна робота– фізична величина, модуль якої дорівнює творусили на шлях, пройдений тілом вздовж напрямку дії цієї силиы:
На честь англійського вченого Д. Джоуля одиниця механічної роботи отримала назву 1 джоуль(згідно з формулою, 1 Дж = 1 Н·м).
Якщо на тіло, що розглядається, діє деяка сила, значить, на нього діє деяке тіло. Тому робота сили над тілом та робота тіла над тілом – повні синоніми.Проте робота першого тіла над другим і робота другого тіла над першим – часткові синоніми, оскільки модулі цих робіт завжди рівні, а їх знаки завжди протилежні. Саме тому у формулі є знак «±». Обговоримо знаки роботи докладніше.
Саме тому у формулі є знак «±». Обговоримо знаки роботи докладніше.
Числові значення сили та шляхи – завжди невід’ємні величини. На відміну від них механічна робота може мати як позитивний, і негативний знаки. Якщо напрямок сили збігається з напрямком руху тіла, то роботу сили вважають позитивною.Якщо напрям сили протилежний напрямку руху тіла, роботу сили вважають негативною(беремо «-» з «±» формули). Якщо напрям руху тіла перпендикулярно до напрямку дії сили, то така сила роботу не здійснює, тобто A = 0.
Розгляньте три ілюстрації з трьох аспектів механічної роботи.
Вчинення силою роботи може виглядати по-різному з погляду різних спостерігачів.Розглянемо приклад: дівчинка їде у ліфті вгору. Чи здійснює вона механічну роботу? Дівчинка може виконувати роботу лише над тими тілами, куди діє силою. Таке тіло лише одне – кабіна ліфта, тому що дівчинка тисне на її підлогу своєю вагою. Тепер треба з’ясувати, чи проходить кабіна певний шлях. Розглянемо два варіанти: з нерухомим і спостерігачем, що рухається.
Розглянемо два варіанти: з нерухомим і спостерігачем, що рухається.
Нехай спочатку хлопчик-спостерігач сидить на землі. По відношенню до нього кабіна ліфта рухається нагору і проходить певний шлях. Вага дівчинки спрямована в протилежний бік- вниз, отже, дівчинка здійснює над кабіною негативну механічну роботу: AдівAдів = 0.
« Фізика – 10 клас»
Закон збереження енергії — фундаментальний закон природи, що дозволяє описувати більшість явищ, що відбуваються.
Опис руху тіл також можливий за допомогою таких понять динаміки, як робота та енергія.
Згадайте, що таке робота та потужність у фізиці.
Чи збігаються ці поняття з побутовими уявленнями про них?
Всі наші щоденні дії зводяться до того, що ми за допомогою м’язів або приводимо в рух оточуючі тіла і підтримуємо цей рух, або ж зупиняємо тіла, що рухаються.
Цими тілами є знаряддя праці (молоток, ручка, пилка), в іграх – м’ячі, шайби, шахові фігури. На виробництві та в сільському господарствілюди також надають руху знаряддя праці.
Застосування машин у багато разів збільшує продуктивність праці завдяки використанню двигунів.
Призначення будь-якого двигуна в тому, щоб приводити тіла в рух і підтримувати цей рух, незважаючи на гальмування як звичайним тертям, так і «робочим» опором (різець повинен не просто ковзати по металу, а врізаючись у нього, знімати стружку; плуг повинен розпушувати землю і т. д.). При цьому на тіло, що рухається, повинна діяти з боку двигуна сила.
Робота відбувається в природі завжди, коли на якесь тіло у напрямку його руху або проти нього діє сила (або кілька сил) з боку іншого тіла (інших тіл).
Сила тяжіння здійснює роботу при падінні крапель дощу або каменю з урвища. Одночасно здійснює роботу і сила опору, що діє на краплі, що падають, або на камінь з боку повітря. Здійснює роботу та сила пружності, коли розпрямляється зігнуте вітром дерево.
Визначення роботи.
Другий закон Ньютона у імпульсній формі Δ = Δtдозволяє визначити, як змінюється швидкість тіла за модулем та напрямом, якщо на нього протягом часу Δt діє сила .
Впливи на тіла сил, що призводять до зміни модуля їх швидкості, характеризуються величиною, яка залежить як від сил, так і від переміщень тіл. Цю величину у механіці і називають роботою сили.
Зміна швидкості за модулем можлива лише в тому випадку, коли проекція сили F r на напрямок переміщення тіла відрізняється від нуля. Саме ця проекція визначає дію сили, яка змінює швидкість тіла за модулем. Вона виконує роботу. Тому роботу можна розглядати як добуток проекції сили F r на модуль переміщення |Δ| (рис. 5.1):
А = F r |. (5.1)
Якщо кут між силою та переміщенням позначити через α, то F r = Fcosα.
Отже, робота дорівнює:
А = | Δ | cosα. (5.2)
Наше побутове уявлення про роботу відрізняється від визначення роботи у фізиці. Ви тримаєте важку валізу, і вам здається, що ви робите роботу. Проте з погляду ізики ваша робота дорівнює нулю.
Робота постійної сили дорівнює добутку модулів сили та переміщення точки докладання сили та косинуса кута між ними.
У загальному випадку під час руху твердого тілапереміщення його різних точок різні, але при визначенні роботи сили ми під Δ розуміємо переміщення її точки програми. При поступальному русі твердого тіла переміщення всіх точок збігається з переміщенням точки докладання сили.
Робота, на відміну сили і переміщення, не векторної, а скалярної величиною. Вона може бути позитивною, негативною або рівною нулю.
Знак роботи визначається знаком косинуса кута між силою та переміщенням. Якщо α0, оскільки косинус гострих кутів позитивний. При α > 90° робота негативна, оскільки косинус тупих кутів негативний. При α = 90° (сила перпендикулярна до переміщення) робота не здійснюється.
Якщо на тіло діє кілька сил, то проекція рівнодіючої сили на переміщення дорівнює сумі проекцій окремих сил:
F r = F 1r + F 2r + … .
Тому для роботи рівнодіючої сили отримуємо
А = F 1r | + F 2r | + … = А 1 + А 2 + …. (5.3)
Якщо на тіло діє кілька сил, то повна робота(Алгебраїчна сума робіт всіх сил) дорівнює роботі рівнодіючої сили.
Здійснену силою роботу можна уявити графічно. Пояснимо це, зобразивши на малюнку залежність проекції сили від координати тіла під час його руху прямою.
Нехай тіло рухається вздовж осі ОХ (рис. 5.2), тоді
Fcos = F x , |Δ| = Δ х.
Для роботи сили отримуємо
А = F|Δ|cosα = F x Δx.
Вочевидь, площа прямокутника, заштрихованого малюнку (5.3, а), чисельно дорівнює роботі під час переміщення тіла з точки з координатою х1 в точку з координатою х2.
Формула (5.1) справедлива у разі, коли проекція сили на переміщення постійна. У разі криволінійної траєкторії, постійної чи змінної сили ми поділяємо траєкторію на малі відрізки, які можна вважати прямолінійними, а проекцію сили на малому переміщенні Δ — Постійною.
Тоді, обчислюючи роботу на кожному переміщенні Δ а потім підсумовуючи ці роботи, ми визначаємо роботу сили на кінцевому переміщенні (рис. 5.3 б).Одиниця роботи.
Одиниця роботи можна встановити за допомогою основної формули (5. 2). Якщо при переміщенні тіла на одиницю довжини на нього діє сила, модуль якої дорівнює одиниці, і напрямок сили збігається з напрямком переміщення її точки додатка (α = 0), то і робота дорівнюватиме одиниці. У Міжнародній системі (СІ) одиницею роботи є Джоуль (позначається Дж):
2). Якщо при переміщенні тіла на одиницю довжини на нього діє сила, модуль якої дорівнює одиниці, і напрямок сили збігається з напрямком переміщення її точки додатка (α = 0), то і робота дорівнюватиме одиниці. У Міжнародній системі (СІ) одиницею роботи є Джоуль (позначається Дж):
1 Дж = 1 Н 1 м = 1 Н м.
Джоуль— це робота, що здійснюється силою 1 Н на переміщенні 1 якщо напрямки сили та переміщення збігаються.
Часто використовують кратні одиниці роботи — кілоджоуль та мега джоуль:
1 кДж = 1000 Дж,
1 МДж = 1000000 Дж.
Робота може бути виконана як за великий проміжок часу, так і дуже малий. Насправді, проте, далеко ще не байдуже, швидко чи повільно може бути виконана робота. Часом, протягом якого виконується робота, визначають продуктивність будь-якого двигуна. Дуже велику роботуможе зробити і крихітний електромотор, але для цього знадобиться багато часу. Тому поруч із роботою вводять величину, характеризує швидкість, з якою вона виробляється, — потужність.
Потужність — це відношення роботи А до інтервалу часу Δt, за який ця робота виконана, тобто потужність — це швидкість виконання роботи:
Підставляючи у формулу (5.4) замість роботи А її вираз (5.2), отримуємо
Таким чином, якщо сила та швидкість тіла постійні, то потужність дорівнює добутку модуля вектора сили на модуль вектора швидкості та на косинус кута між напрямками цих векторів. Якщо ж ці величини змінні, то за формулою (5.4) можна визначити середню потужність подібно до визначення середньої швидкостіруху тіла.
Поняття потужності вводиться для оцінки роботи за одиницю часу, що здійснюється будь-яким механізмом (насосом, підйомним краном, двигуном машини і т. д.). Тому в формулах (5.4) і (5.5) під завжди мається на увазі сила тяги.
У СІ потужність виявляється у ватах (Вт).
Потужність дорівнює 1 Вт, якщо робота, що дорівнює 1 Дж, здійснюється за 1 с.
Поряд з ватом використовуються більші (кратні) одиниці потужності:
1 кВт (кіловат) = 1000 Вт,
1 МВт (мегават) = 1 000 000 Вт.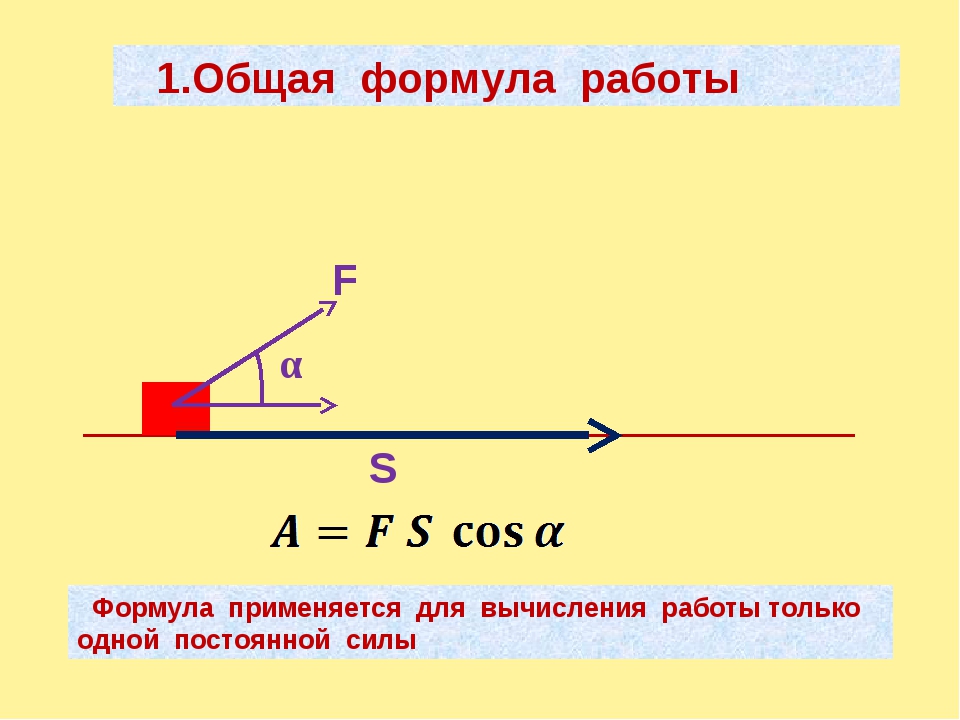
Перш ніж розкривати тему «В чому вимірюється робота», необхідно зробити невеликий відступ. Все у цьому світі підпорядковується законам фізики. Кожен процес чи явище можна пояснити з урахуванням тих чи інших законів фізики. Для кожної вимірюваної величини існує одиниця, в якій прийнято її вимірювати. Одиниці виміру є незмінними і мають єдине значення у всьому світі.
Jpg?.jpg 600w, https://elquanta.ru/wp-content/uploads/2018/03/risunok-1-768×451..jpg 1024w»>
Система міжнародних одиниць
Причиною цього є таке. У тисяча дев’ятсот шістдесятому році на одинадцятій генеральній конференції з мір і ваг була прийнята система вимірювань, яка визнана у всьому світі. Ця система отримала назву Le Système International d’Unités, SI (СІ система інтернаціонал). Ця система стала базовою для визначень прийнятих у всьому світі одиниць виміру та їх співвідношення.
Фізичні терміни та термінологія
У фізиці одиниця виміру роботи сили називається Дж (Джоуль), на честь англійського вченого фізика Джеймса Джоуля, який зробив великий внесок у розвиток розділу термодинаміки у фізиці. Один Джоуль дорівнює роботі, що чиниться силою один Н (Ньютон), при переміщенні її докладання однією М (метр) у бік дії сили. Один Н (Ньютон) дорівнює силі, масою в кг (кілограм), при прискоренні в один м/с2 (метр в секунду) у напрямку сили.
Один Джоуль дорівнює роботі, що чиниться силою один Н (Ньютон), при переміщенні її докладання однією М (метр) у бік дії сили. Один Н (Ньютон) дорівнює силі, масою в кг (кілограм), при прискоренні в один м/с2 (метр в секунду) у напрямку сили.
Jpg?.jpg 600w, https://elquanta.ru/wp-content/uploads/2018/03/risunok-2-2-210×140.jpg 210w»>
Формула знаходження роботи
До відома.У фізиці все взаємозалежне, виконання будь-якої роботи пов’язані з виконанням додаткових дій. Як приклад можна взяти побутовий вентилятор. При включенні вентилятора до мережі лопаті вентилятора починають обертатися. Лопасті, що обертаються, впливають на потік повітря, надаючи йому спрямованого руху. Це результат роботи. Але для виконання роботи необхідний вплив інших сторонніх сил, без яких виконання дії неможливе. До них відносяться сила електричного струму, потужність, напруга та інші взаємопов’язані значення.
Електричний струм, за своєю суттю, – це впорядкований рух електронів у провіднику за одиницю часу.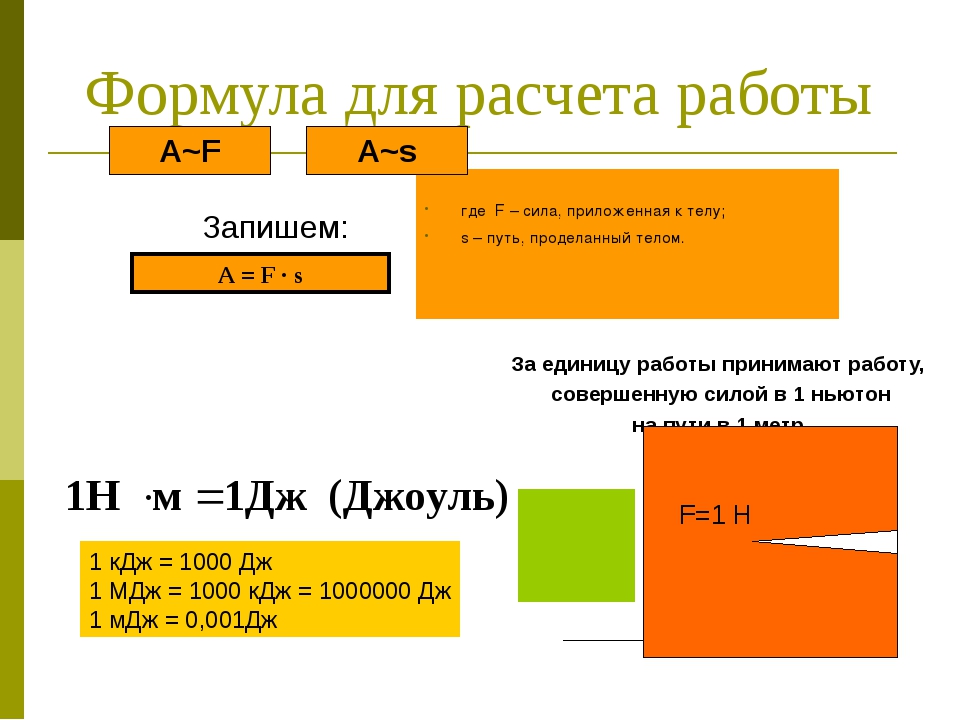 В основі електричного струму лежить позитивно чи негативно заряджені частинки. Вони звуться електричних зарядів. Позначається літерами C, q, Кл (Кулон), названо на честь французького вченого та винахідника Шарля Кулона. У системі СІ є одиницею виміру кількості заряджених електронів. 1 Кл дорівнює обсягу заряджених частинок, що протікають через поперечний переріз провідника за одиницю часу. Під одиницею часу мається на увазі одна секунда. Формула електричного заряду представлена нижче малюнку.
В основі електричного струму лежить позитивно чи негативно заряджені частинки. Вони звуться електричних зарядів. Позначається літерами C, q, Кл (Кулон), названо на честь французького вченого та винахідника Шарля Кулона. У системі СІ є одиницею виміру кількості заряджених електронів. 1 Кл дорівнює обсягу заряджених частинок, що протікають через поперечний переріз провідника за одиницю часу. Під одиницею часу мається на увазі одна секунда. Формула електричного заряду представлена нижче малюнку.
Jpg?.jpg 600w, https://elquanta.ru/wp-content/uploads/2018/03/risunok-3-768×486..jpg 848w»>
Формула знаходження електричного заряду
Сила електричного струму позначається літерою А (ампер). Ампер – це одиниця у фізиці, що характеризує вимірювання роботи сили, яка витрачається для переміщення зарядів провідником. За своєю суттю, електричний струм– це впорядкований рух електронів у провіднику під впливом електромагнітного поля. Під провідником мається на увазі матеріал або розплав солей (електроліт), що має невелику опірність до проходження електронів. На силу електричного струму впливають дві фізичні величини: напруга та опір. Вони будуть розглянуті нижче. Сила струму завжди прямо пропорційна за напругою і обернено пропорційна по опору.
На силу електричного струму впливають дві фізичні величини: напруга та опір. Вони будуть розглянуті нижче. Сила струму завжди прямо пропорційна за напругою і обернено пропорційна по опору.
600w, https://elquanta.ru/wp-content/uploads/2018/03/risunok-4-768×552..jpg 800w»>
Формула знаходження напруги
Потужність – це кількість енергії, що витрачається виконання роботи в один Дж (Джоуль) за проміжок часу в одну секунду. Одиницею виміру у фізиці позначається як Вт (Ватт), у системі СІ W (Watt). Оскільки розглядається електрична потужність, то тут вона є значенням витраченої електричної енергіїна виконання певної дії у проміжок часу.
Jpg?.jpg 600w, https://elquanta.ru/wp-content/uploads/2018/03/risunok-6-120×74..jpg 750w»>
Формула знаходження електричної потужності
На закінчення слід зазначити, що одиниця виміру роботи є скалярною величиною, має взаємозв’язок з усіма розділами фізики і може розглядатися з боку як електродинаміки або теплотехніки, а й інших розділів. У статті коротко розглянуто значення, що характеризує одиницю виміру роботи сили.
У статті коротко розглянуто значення, що характеризує одиницю виміру роботи сили.
Відео
Одне з найважливіших понять механіки – робота сили .
Робота сили
Всі фізичні тіла в навколишньому світі наводяться за допомогою сили. Якщо на тіло, що рухається, в попутному або протилежному напрямку діє сила або кілька сил з боку одного або декількох тіл, то кажуть, що відбувається робота .
Тобто, механічна роботу виконує сила, що діє на тіло. Так, сила тяги електровоза надає руху весь поїзд, тим самим роблячи механічну роботу. Велосипед рухається мускульною силою ніг велосипедиста. Отже, ця сила також здійснює механічну роботу.
У фізиці роботою сили називають фізичну величину, рівну добутку модуля сили, модуля переміщення точки докладання сили та косинуса кута між векторами сили та переміщення.
A = F · s · cos (F, s) ,
де F модульсили,
s –
модуль переміщення .
Робота відбувається завжди, якщо кут між вітрами сили та переміщення не дорівнює нулю. Якщо сила діє у напрямку, протилежному напрямку руху, величина роботи має негативне значення.
Робота не відбувається, якщо на тіло не діють сили, або якщо кут між прикладеною силою та напрямком руху дорівнює 90 о (cos 90 o = 0).
Якщо кінь тягне віз, то м’язова сила коня, або сила тяги, спрямовану по ходу руху воза, виконує роботу. А сила тяжкості, з якою візник тисне на віз, роботи не здійснює, оскільки вона спрямована вниз, перпендикулярно до напрямку переміщення.
Робота сили – величина скалярна.
Одиниця роботи у системі вимірювань СІ — Джоуль. 1 джоуль – це робота, яку здійснює сила завбільшки 1 ньютон з відривом 1 м, якщо напрями сили та переміщення збігаються.
Якщо на тіло або матеріальну точку діють кілька сил, то говорять про роботу, яка їх рівноважна сила.
Якщо прикладена сила непостійна, то її робота обчислюється як інтеграл:
Потужність
Сила, що приводить у рух тіло, здійснює механічну роботу. Але як відбувається ця робота, швидко чи повільно, іноді дуже важливо знати практично. Адже одна й та сама робота може бути виконана за різний час. Роботу, яку виконує великий електромотор, може виконати та маленький моторчик. Але йому для цього знадобиться набагато більше часу.
Але як відбувається ця робота, швидко чи повільно, іноді дуже важливо знати практично. Адже одна й та сама робота може бути виконана за різний час. Роботу, яку виконує великий електромотор, може виконати та маленький моторчик. Але йому для цього знадобиться набагато більше часу.
У механіці існує величина, що характеризує швидкість виконання роботи. Ця величина називається потужністю.
Потужність – це відношення роботи, виконаної за певний проміжок часу до величини цього проміжку.
N = A /∆ t
За визначенням А = F · s · cos α , а s/∆ t = v , отже
N = F · v · cos α = F · v ,
де F
— Сила, v
швидкість, α
– кут між напрямком сили та напрямок швидкості.
Тобто потужність – це скалярний твірвектор сили на вектор швидкості руху тіла.
В міжнародної системиСІ потужність вимірюється у ватах (Вт).
Потужність в 1 ват – це робота в 1 джоуль (Дж), що здійснюється за 1 секунду (с).
Потужність можна збільшити, якщо збільшити силу, що здійснює роботу, або швидкість, з якою ця робота відбувається.
Механічна робота. Формула. Формулювання визначення. У чому вимірюється робота
Ви знаєте, що таке робота? Без сумніву. Що таке робота, знає кожна людина, за умови, що він народжений і живе на планеті Земля. А що таке механічна робота?
Це поняття теж відомо більшості людей на планеті, хоча деякі окремі особистості і мають досить туманне уявлення про цей процес. Але мова зараз не про них. Ще менша кількість людей мають уявлення, що таке механічна робота з точки зору фізики. У фізиці механічна робота — це не праця людини заради прожитку, це фізична величина, яка може бути абсолютно ніяк не пов’язана ні з людиною, ні з іншим яким-небудь живою істотою. Як так? Зараз розберемося.
У фізиці механічна робота — це не праця людини заради прожитку, це фізична величина, яка може бути абсолютно ніяк не пов’язана ні з людиною, ні з іншим яким-небудь живою істотою. Як так? Зараз розберемося.
Механічна робота у фізиці
Наведемо два приклади. У першому прикладі води річки, зіткнувшись з прірвою, шумно падають вниз у вигляді водоспаду. Другий приклад — це людина, яка тримає на витягнутих руках важкий предмет, наприклад, утримує надлому дах над ганком дачного будиночка від падіння, поки його дружина і діти судорожно шукають, чим її підперти. В якому випадку відбувається механічна робота?
Визначення механічної роботи
Практично всі, не замислюючись, дадуть відповідь: у другому. І будуть не праві. Насправді все якраз навпаки. У фізиці механічна робота описується наступними визначеннями: механічна робота здійснюється тоді, коли на тіло діє сила, і воно рухається. Механічна робота прямо пропорційна доданої силі і пройденого шляху.
Формула механічної роботи
Визначається механічна робота формулою:
де A — робота,
F — сила,
s — пройдений шлях.
Так що, не дивлячись на весь героїзм втомленого власника даху, виконана їм робота дорівнює нулю, а ось вода, падаючи під дією сили тяжіння з високої скелі, робить саму, що ні на є, механічну роботу. Тобто, якщо ми будемо штовхати важку шафу безуспішно, то виконана нами робота з точки зору фізики буде дорівнює нулю, незважаючи на те, що ми докладаємо багато сил. А ось якщо ми зрушимо шафа на деяку відстань, то тоді ми виконаємо роботу, що дорівнює добутку прикладеної сили на відстань, на яке ми пересунули тіло.
Одиниця роботи — 1 Дж. Це робота, здійснена силою в 1 ньютон, по пересуванню тіла на відстань в 1 м. Якщо напрямок прикладеної сили збігається з напрямом руху тіла, то дана сила здійснює позитивну роботу. Приклад — це коли ми штовхаємо якесь тіло, і воно рухається. А в разі, коли сила прикладена в протилежну руху тіла сторону, наприклад, сила тертя, то дана сила здійснює негативну роботу. Якщо ж прикладена сила ніяк не впливає на рух тіла, то сила, що здійснюються цією роботою, дорівнює нулю.
Перш ніж розкривати тему «У чому вимірюється робота», необхідно зробити невеликий відступ. Все в цьому світі підкоряється законам фізики. Кожен процес або явище можна пояснити на основі тих чи інших законів фізики. Для кожної вимірюваної величини існує одиниця, в якій її прийнято вимірювати. Одиниці виміру є незмінними і мають єдине значення у всьому світі.
Jpg? .Jpg 600w, https://elquanta.ru/wp-content/uploads/2018/03/risunok-1-768×451..jpg 1024w «sizes \u003d» (max-width: 600px) 100vw, 600px «\u003e
Система міжнародних одиниць
Причиною цього є наступне. У тисяча дев’ятсот шістдесятому році на одинадцятій генеральної конференції з мір та ваг була прийнята система вимірювань, яка визнана у всьому світі. Ця система отримала назву Le Système International d’Unités, SI (СІ система інтернаціонал). Ця система стала базовою для визначень прийнятих в усьому світі одиниць вимірювання і їх співвідношення.
Фізичні терміни і термінологія
У фізиці одиниця виміру роботи сили називається Дж (Джоуль), на честь англійського вченого фізика Джеймса Джоуля, яка зробила великий внесок у розвиток розділу термодинаміки в фізиці. Один Джоуль дорівнює роботі, яку здійснюють силою в один Н (Ньютон), при переміщенні її застосування на один М (м) в напрямку дії сили. Один Н (Ньютон) дорівнює силі, масою в один кг (кілограм), при прискоренні в один м / с2 (метр в секунду) в напрямку сили.
Один Джоуль дорівнює роботі, яку здійснюють силою в один Н (Ньютон), при переміщенні її застосування на один М (м) в напрямку дії сили. Один Н (Ньютон) дорівнює силі, масою в один кг (кілограм), при прискоренні в один м / с2 (метр в секунду) в напрямку сили.
Jpg? .Jpg 600w, https://elquanta.ru/wp-content/uploads/2018/03/risunok-2-2-210×140.jpg 210w «sizes \u003d» (max-width: 600px) 100vw, 600px «\u003e
Формула знаходження роботи
До відома. У фізиці все взаємопов’язане, виконання будь-якої роботи пов’язане з виконанням додаткових дій. Як приклад можна взяти побутової вентилятор. При включенні вентилятора в мережу лопаті вентилятора починають обертатися. Обертові лопаті впливають на потік повітря, надаючи йому спрямований рух. Це є результатом роботи. Але для виконання роботи необхідно вплив інших сторонніх сил, без яких виконання дії неможливо. До них відносяться сила електричного струму, потужність, напруга і багато інших взаємопов’язані значення.
Електричний струм, по своїй суті, — це впорядкований рух електронів в провіднику в одиницю часу.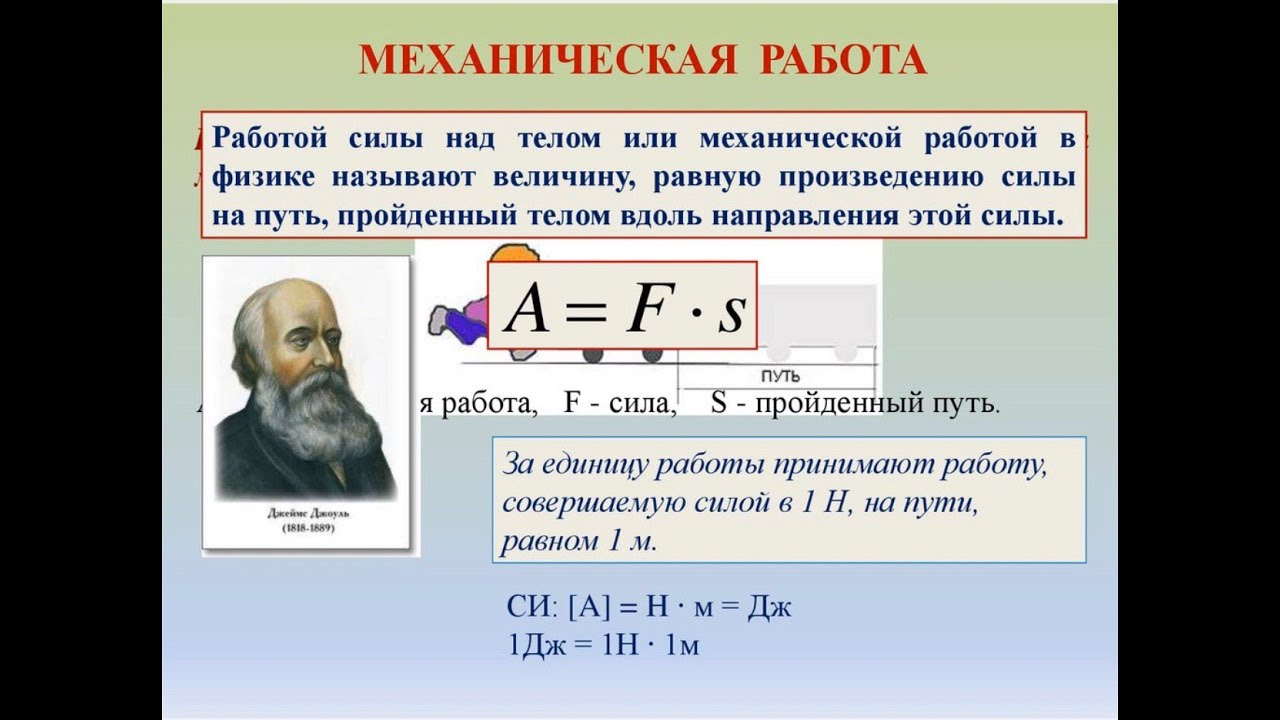 В основі електричного струму лежить позитивно або негативно заряджені частинки. Вони носять назву електричних зарядів. Позначається буквами C, q, Кл (Кулон), названо на честь французького вченого і винахідника Шарля Кулона. В системі СІ є одиницею вимірювання кількості заряджених електронів. 1 Кл дорівнює обсягу заряджених частинок, що протікають через поперечний переріз провідника за одиницю часу. Під одиницею часу мається на увазі одна секунда. Формула електричного заряду представлена \u200b\u200bнижче на малюнку.
В основі електричного струму лежить позитивно або негативно заряджені частинки. Вони носять назву електричних зарядів. Позначається буквами C, q, Кл (Кулон), названо на честь французького вченого і винахідника Шарля Кулона. В системі СІ є одиницею вимірювання кількості заряджених електронів. 1 Кл дорівнює обсягу заряджених частинок, що протікають через поперечний переріз провідника за одиницю часу. Під одиницею часу мається на увазі одна секунда. Формула електричного заряду представлена \u200b\u200bнижче на малюнку.
Jpg? .Jpg 600w, https://elquanta.ru/wp-content/uploads/2018/03/risunok-3-768×486..jpg 848w «sizes \u003d» (max-width: 600px) 100vw, 600px «\u003e
Формула знаходження електричного заряду
Сила електричного струму позначається буквою А (ампер). Ампер — це одиниця в фізиці, що характеризує вимір роботи сили, яка витрачається для переміщення зарядів по провіднику. За своєю суттю, електричний струм — це впорядкований рух електронів в провіднику під впливом електромагнітного поля. Під провідником мається на увазі матеріал або розплав солей (електроліт), який має невелику опірність проходженню електронів. На силу електричного струму впливають дві фізичні величини: напруга і опір. Вони будуть розглянуті нижче. Сила струму завжди прямо пропорційна по напрузі і обернено пропорційна по опору.
Під провідником мається на увазі матеріал або розплав солей (електроліт), який має невелику опірність проходженню електронів. На силу електричного струму впливають дві фізичні величини: напруга і опір. Вони будуть розглянуті нижче. Сила струму завжди прямо пропорційна по напрузі і обернено пропорційна по опору.
Jpg? .Jpg 600w, https://elquanta.ru/wp-content/uploads/2018/03/risunok-4-768×552..jpg 800w «sizes \u003d» (max-width: 600px) 100vw, 600px «\u003e
Формула знаходження сили струму
Як було сказано вище, електричний струм — це впорядкований рух електронів в провіднику. Але є один нюанс: для їх руху потрібен певний вплив. Це вплив створюється шляхом створення різниці потенціалів. Електричний заряд може бути позитивним або негативним. Позитивні заряди завжди прагнуть до негативних зарядів. Це необхідно для рівноваги системи. Різниця між кількістю позитивно і негативно заряджених частинок називається електричною напругою.
Gif? .Gif 600w, https://elquanta.ru/wp-content/uploads/2018/03/risunok-5-768×499. gif 768w «sizes \u003d» (max-width: 600px) 100vw, 600px «\u003e
gif 768w «sizes \u003d» (max-width: 600px) 100vw, 600px «\u003e
Формула знаходження напруги
Потужність — це кількість енергії, що витрачається на виконання роботи в один Дж (Джоуль) за проміжок часу в одну секунду. Одиницею вимірювання у фізиці позначається як Вт (Ватт), в системі СІ W (Watt). Так як розглядається потужність електрична, то тут вона є значенням витраченої електричної енергії на виконання певної дії в проміжок часу.
Jpg? .Jpg 600w, https://elquanta.ru/wp-content/uploads/2018/03/risunok-6-120×74..jpg 750w «sizes \u003d» (max-width: 600px) 100vw, 600px «\u003e
Формула знаходження електричної потужності
На закінчення слід зазначити, що одиниця вимірювання роботи є скалярною величиною, має взаємозв’язок з усіма розділами фізики і може розглядатися з боку не тільки електродинаміки або теплотехніки, а й інших розділів. У статті коротко розглянуто значення, що характеризує одиницю виміру роботи сили.
Відео
« Фізика — 10 клас »
Закон збереження енергії — фундаментальний закон природи, що дозволяє описувати більшість явищ, що відбуваються.
Опис руху тіл також можливо за допомогою таких понять динаміки, як робота і енергія.
Згадайте, що таке робота і потужність у фізиці.
Чи збігаються ці поняття з побутовими уявленнями про них?
Всі наші щоденні дії зводяться до того, що ми за допомогою м’язів або наводимо в рух навколишні тіла і підтримуємо цей рух, або ж зупиняємо рухомі тіла.
Цими тілами є знаряддя праці (молоток, ручка, пила), в іграх — м’ячі, шайби, шахові фігури. На виробництві і в сільському господарстві люди також надають руху знаряддя праці.
Застосування машин у багато разів збільшує продуктивність праці завдяки використанню в них двигунів.
Призначення будь-якого двигуна в тому, щоб приводити тіла в рух і підтримувати цей рух, незважаючи на гальмування як звичайним тертям, так і «робочим» опором (різець повинен не просто ковзати по металу, а, врізаючись в нього, знімати стружку; плуг повинен розпушувати землю і т. д.). При цьому на рухоме тіло має діяти з боку двигуна сила.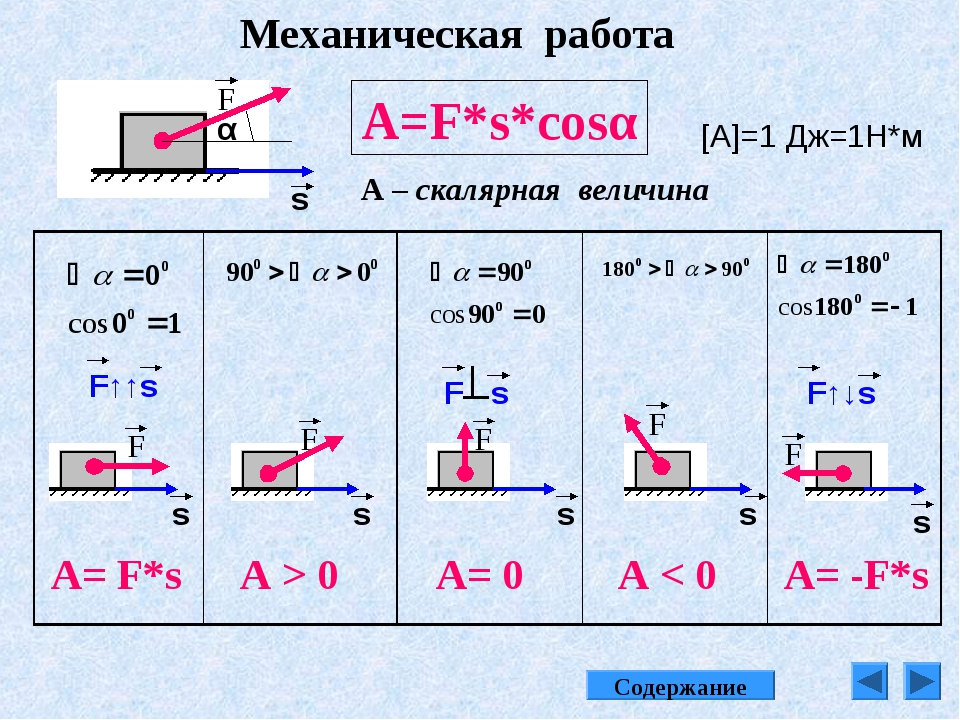
Робота відбувається в природі завжди, коли на будь-яке тіло в напрямку його руху або проти нього діє сила (або кілька сил) з боку іншого тіла (інших тіл).
Сила тяжіння робить роботу при падінні крапель дощу або каменю з обриву. Одночасно здійснює роботу і сила опору, що діє на падаючі краплі або на камінь з боку повітря. Здійснює роботу і сила пружності, коли розпрямляється зігнуте вітром дерево.
Визначення роботи.
Другий закон Ньютона в імпульсної формі Δ \u003d Δt дозволяє визначити, як змінюється швидкість тіла по модулю і напрямку, якщо на нього протягом часу Δt діє сила.
Впливу на тіла сил, що призводять до зміни модуля їх швидкості, характеризуються величиною, яка як від сил, так і від переміщень тел. Цю величину в механіці і називають роботою сили.
Зміна швидкості по модулю можливо лише в тому випадку, коли проекція сили F r на напрямок переміщення тіла відмінна від нуля. Саме ця проекція визначає дію сили, що змінює швидкість тіла по модулю. Вона здійснює роботу. Тому роботу можна розглядати як твір проекції сили F r на модуль переміщення |Δ|
(Рис. 5.1):
Вона здійснює роботу. Тому роботу можна розглядати як твір проекції сили F r на модуль переміщення |Δ|
(Рис. 5.1):
А \u003d F r | Δ |. (5.1)
Якщо кут між силою і переміщенням позначити через α, то F r \u003d Fcosα.
Отже, робота дорівнює:
А \u003d | Δ | cosα. (5.2)
Наше побутове уявлення про роботу відрізняється від визначення роботи у фізиці. Ви тримаєте важкий чемодан, і вам здається, що ви робите роботу. Однак з точки зору Ізіко ваша робота дорівнює нулю.
Робота постійної сили дорівнює добутку модулів сили і переміщення точки прикладання сили і косинуса кута між ними.
У загальному випадку при русі твердого тіла переміщення його різних точок різні, але при визначенні роботи сили ми під Δ розуміємо переміщення її точки прикладання. При поступальному русі твердого тіла переміщення всіх його точок збігається з переміщенням точки прикладання сили.
Робота, на відміну від сили і переміщення, є не векторної, а скалярною величиною. Вона може бути позитивною, негативною або рівною нулю.
Вона може бути позитивною, негативною або рівною нулю.
Знак роботи визначається знаком косинуса кута між силою і переміщенням. якщо α 0, так як косинус гострих кутів позитивний. При α\u003e 90 ° робота негативна, так як косинус тупих кутів негативний. При α \u003d 90 ° (сила перпендикулярна переміщенню) робота не відбувається.
Якщо на тіло діє кілька сил, то проекція рівнодіюча сили на переміщення дорівнює сумі проекцій окремих сил:
F r \u003d F 1r + F 2r + … .
Тому для роботи рівнодіючої сили отримуємо
А \u003d F 1r | Δ | + F 2r | Δ | + … \u003d А 1 + А 2 + …. (5.3)
Якщо на тіло діє кілька сил, то повна робота (алгебраїчна сума робіт всіх сил) дорівнює роботі рівнодіюча сили.
Вчинену силою роботу можна представити графічно. Пояснимо це, зобразивши на малюнку залежність проекції сили від координати тіла при його русі по прямій.
Нехай тіло рухається вздовж осі ОХ (рис. 5.2), тоді
Fcosα \u003d F x, | Δ | \u003d Δ х.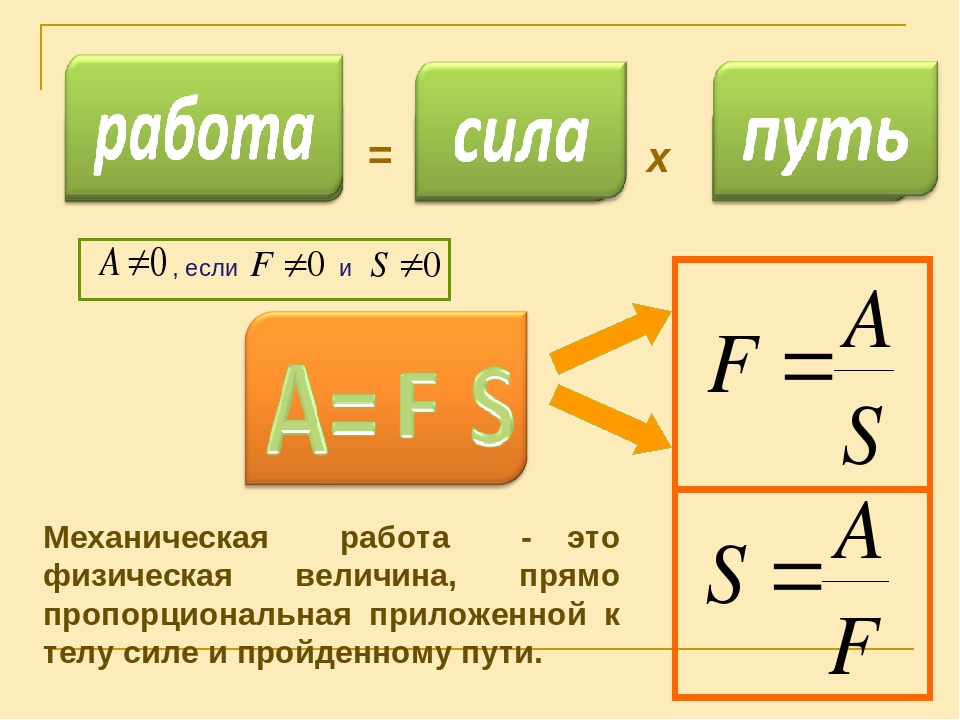
Для роботи сили отримуємо
А \u003d F | Δ | cosα \u003d F x Δx.
Очевидно, що площа прямокутника, заштрихованого на малюнку (5.3, а), чисельно дорівнює роботі при переміщенні тіла з точки з координатою х1 в точку з координатою х2.
Формула (5.1) справедлива в тому випадку, коли проекція сили на переміщення постійна. У разі криволінійної траєкторії, постійної або змінної сили ми поділяємо траєкторію на малі відрізки, які можна вважати прямолінійними, а проекцію сили на малому переміщенні Δ — постійною.
Тоді, обчислюючи роботу на кожному переміщенні Δ а потім підсумовуючи ці роботи, ми визначаємо роботу сили на кінцевому переміщенні (рис. 5.3, б).Одиниця роботи.
Одиницю роботи можна встановити за допомогою основної формули (5.2). Якщо при переміщенні тіла на одиницю довжини на нього діє сила, модуль якої дорівнює одиниці, і напрямок сили збігається з напрямом переміщення її точки прикладання (α \u003d 0), то і робота буде дорівнює одиниці.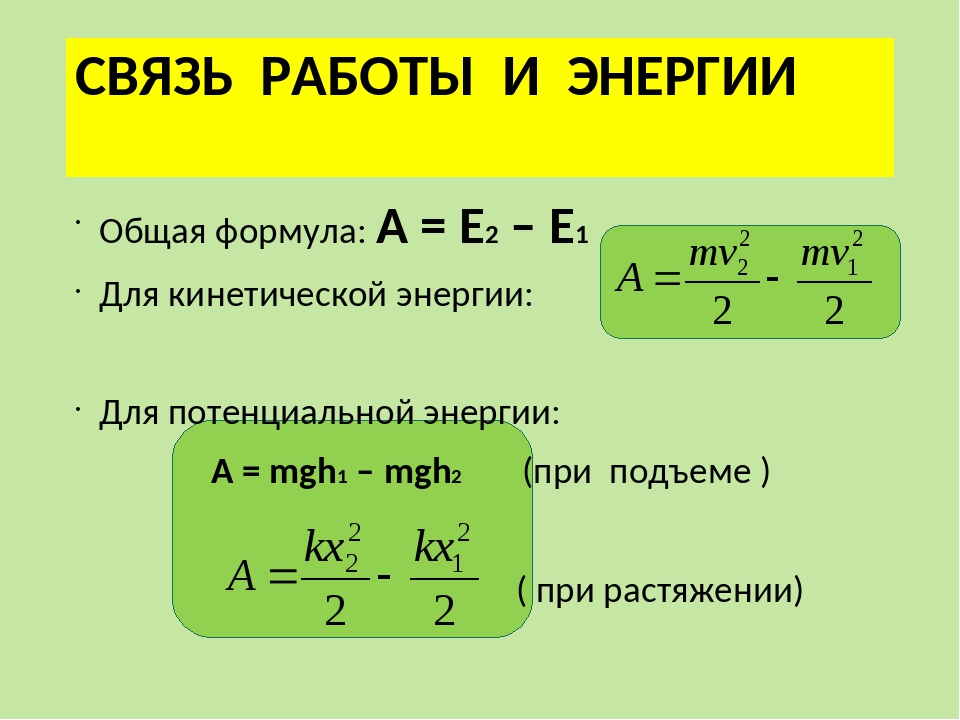 У Міжнародній системі (СІ) одиницею роботи є джоуль (позначається Дж):
У Міжнародній системі (СІ) одиницею роботи є джоуль (позначається Дж):
1 Дж \u003d 1 Н 1 м \u003d 1 Н м.
Джоуль — це робота, що здійснюються силою 1 Н на переміщення 1 якщо напрямки сили і переміщення збігаються.
Часто використовують кратні одиниці роботи — кілоджоуль і мега джоуль:
1 кДж \u003d 1000 Дж,
1 МДж \u003d 1000000 Дж.
Робота може бути здійснена як за великий проміжок часу, так і за дуже малий. На практиці, однак, далеко не байдуже, швидко або повільно може бути здійснена робота. Часом, протягом якого відбувається робота, визначають продуктивність будь-якого двигуна. Дуже велику роботу може зробити і крихітний електромоторчик, але для цього знадобиться багато часу. Тому поряд з роботою вводять величину, що характеризує швидкість, з якою вона проводиться, — потужність.
Потужність — це відношення роботи А до інтервалу часу Δt, за який ця робота здійснена, т. Е. Потужність — це швидкість здійснення роботи:
Підставляючи в формулу (5. 4) замість роботи А її вираження (5.2), отримуємо
4) замість роботи А її вираження (5.2), отримуємо
Таким чином, якщо сила і швидкість тіла постійні, то потужність дорівнює добутку модуля вектора сили на модуль вектора швидкості і на косинус кута між напрямками цих векторів. Якщо ж ці величини змінні, то за формулою (5.4) можна визначити середню потужність подібно визначенню середньої швидкості руху тіла.
Поняття потужності вводиться для оцінки роботи за одиницю часу, яку здійснюють будь-яким механізмом (насосом, підйомним краном, мотором машини і т. Д.). Тому в формулах (5.4) і (5.5) під завжди мається на увазі сила тяги.
В СІ потужність виражається в ватах (Вт).
Потужність дорівнює 1 Вт, якщо робота, рівна 1 Дж, відбувається за 1 с.
Поряд з Ватто використовуються більші (кратні) одиниці потужності:
1 кВт (кіловат) \u003d 1000 Вт,
1 МВт (мегават) \u003d 1 000 000 Вт.
А що це означає?
У фізиці «механічною роботою» називають роботу який-небудь сили (сили тяжіння, пружності, тертя і т. д.) над тілом, в результаті дії якої тіло переміщається.
д.) над тілом, в результаті дії якої тіло переміщається.
Часто слово «механічна» просто не пишеться.
Іноді можна зустріти вираз «тіло вчинила роботу», що в принципі означає «сила, що діє на тіло, зробила роботу».
Я думаю — я працюю.
Я йду — я теж працюю.
Де ж тут механічна робота?
Якщо під дією сили тіло переміщається, то відбувається механічна робота.
Кажуть, що тіло здійснює роботу.
А точніше буде так: роботу виконує сила, що діє на тіло.
Робота характеризує результат дії сили.
Cіли, що діють на людину роблять над ним механічну роботу, а в результаті дії цих сил людина переміщається.
Робота — фізична величина, що дорівнює добутку сили, що діє на тіло, на шлях, досконалий тілом під дією сили в напрямку цієї сили.
А — механічна робота,
F — сила,
S — пройдений шлях.
Робота відбувається, Якщо дотримуються одночасно 2 умови: на тіло діє сила і воно
переміщається в напрямку дії сили.
Робота не відбувається (Тобто дорівнює 0), якщо:
1. Сила діє, а тіло не переміщається.
Сила діє, а тіло не переміщається.
Наприклад: ми діємо з силою на камінь, але не можемо його зрушити.
2. Тіло рухається, а сила дорівнює нулю, або всі сили компенсовані (тобто рівнодіюча цих сил дорівнює 0).
Наприклад: при русі по інерції робота не відбувається.
3. Напрямок дії сили і напрямок руху тіла взаємно перпендикулярні.
Наприклад: під час руху поїзда по горизонталі сила тяжіння роботу не робить.
Робота може бути позитивною і негативною
1. Якщо напрям сили і напрям руху тіла збігаються, відбувається позитивна робота.
Наприклад: сила тяжіння, діючи на падаючу вниз краплю води, здійснює позитивну роботу.
2. Якщо напрям сили і рухи тіла протилежні, відбувається негативна робота.
Наприклад: сила тяжіння, що діє на піднімається повітряна кулька, здійснює негативну роботу.
Якщо на тіло діє кілька сил, то повна робота всіх сил дорівнює роботі результуючої сили.
одиниці роботи
В честь англійського вченого Д. Джоуль одиниця виміру роботи отримала назву 1 Джоуль.
Джоуль одиниця виміру роботи отримала назву 1 Джоуль.
У міжнародній системі одиниць (СІ):
[А] \u003d Дж \u003d Н м
1Дж \u003d 1Н 1м
Механічна робота дорівнює 1 Дж, якщо під дією сили в 1 Н тіло переміщається на 1 м в напрямку дії цієї сили.
При перельоті з великого пальця руки людини на вказівний
комар здійснює роботу — 0, 000 000 000 000 000 000 000 000 001 Дж.
Серце людини за одне скорочення робить приблизно 1 Дж роботи, що відповідає роботі, досконалої при піднятті вантажу масою 10 кг на висоту 1 см.
ЗА РОБОТУ, ДРУЗІ!
Основні теоретичні відомості
механічна робота
Енергетичні характеристики руху вводяться на основі поняття механічної роботи або роботи сили. Роботою, яку здійснюють постійною силою F, Називається фізична величина, що дорівнює добутку модулів сили і переміщення, помноженому на косинус кута між векторами сили F і переміщення S:
Робота є скалярною величиною. Вона може бути як позитивна (0 ° ≤ α
α
≤ 180 °).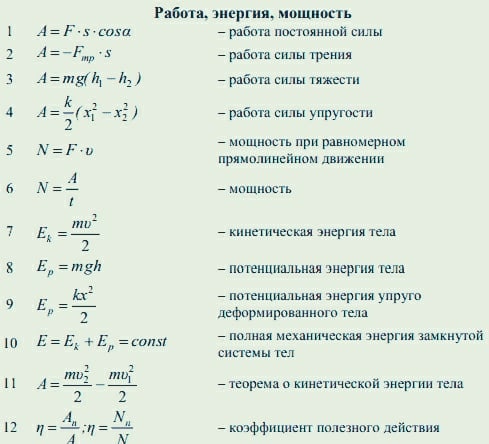 при α
\u003d 90 ° робота, що здійснюються силою, дорівнює нулю. В системі СІ робота вимірюється в джоулях (Дж). Джоуль дорівнює роботі, яку здійснюють силою в 1 ньютон на переміщенні 1 метр в напрямку дії сили.
при α
\u003d 90 ° робота, що здійснюються силою, дорівнює нулю. В системі СІ робота вимірюється в джоулях (Дж). Джоуль дорівнює роботі, яку здійснюють силою в 1 ньютон на переміщенні 1 метр в напрямку дії сили.
Якщо ж сила змінюється з плином часу, то для знаходження роботи будують графік залежності сили від переміщення і знаходять площа фігури під графіком — це і є робота:
Прикладом сили, модуль якої залежить від координати (переміщення), може служити сила пружності пружини, що підкоряється закону Гука ( F упр \u003d kx).
потужність
Робота сили, що здійснюються в одиницю часу, називається потужністю. потужність P (Іноді позначають буквою N) — фізична величина, що дорівнює відношенню роботи A до проміжку часу t, Протягом якого здійснена ця робота:
За цією формулою розраховується середня потужність, Тобто потужність узагальнено характеризує процес. Отже, роботу можна висловлювати і через потужність: A = Pt (Якщо звичайно відома потужність і час здійснення роботи). Одиниця потужності називається ват (Вт) або 1 джоуль за 1 секунду. Якщо рух рівномірний, то:
Одиниця потужності називається ват (Вт) або 1 джоуль за 1 секунду. Якщо рух рівномірний, то:
За цією формулою ми можемо розрахувати миттєву потужність (Потужність в даний момент часу), якщо замість швидкості підставимо в формулу значення миттєвої швидкості. Як дізнатися, яку потужність вважати? Якщо в задачі запитують потужність в момент часу або в якійсь точці простору, то вважається миттєва. Якщо запитують про потужність за якийсь проміжок часу або ділянку шляху, то шукайте середню потужність.
ККД — коефіцієнт корисної дії, Дорівнює відношенню корисної роботи до затраченої, або ж корисної потужності до витраченої:
Яка робота корисна, а яка витрачена визначається з умови конкретного завдання шляхом логічного міркування. Наприклад, якщо підйомний кран здійснює роботу по підйому вантажу на деяку висоту, то корисною буде робота з підняття вантажу (так як саме заради неї створений кран), а витраченої — робота, здійснена електродвигуном крана.
Отже, корисна і витрачена потужність не мають строгого визначення, і знаходяться логічним міркуванням. У кожному завданні ми самі повинні визначити, що в цьому завданні було метою здійснення роботи (корисна робота або потужність), а що було механізмом або способом здійснення всієї роботи (витрачена потужність або робота).
У загальному випадку ККД показує, як ефективно механізм перетворює один вид енергії в інший. Якщо потужність з часом змінюється, то роботу знаходять як площа фігури під графіком залежності потужності від часу:
Кінетична енергія
Фізична величина, що дорівнює половині твори маси тіла на квадрат його швидкості, називається кінетичної енергією тіла (енергією руху):
Тобто якщо автомобіль масою 2000 кг рухається зі швидкістю 10 м / с, то він має кінетичної енергією рівній Е к \u003d 100 кДж і здатний виконати роботу в 100 кДж. Ця енергія може перетворитися в теплову (при гальмуванні автомобіля нагрівається гума коліс, дорога і гальмівні диски) або може бути витрачена на деформацію автомобіля і тіла, з яким автомобіль зіткнувся (на підводному човні). При обчисленні кінетичної енергії не має значення куди рухається автомобіль, так як енергія, як і робота, величина скалярна.
При обчисленні кінетичної енергії не має значення куди рухається автомобіль, так як енергія, як і робота, величина скалярна.
Тіло має енергію, якщо здатне зробити роботу. Наприклад, рух тіло має кінетичної енергією, тобто енергією руху, і здатне здійснювати роботу по деформації тіл або додання прискорення тіл, з якими відбудеться зіткнення.
Фізичний сенс кінетичної енергії: для того щоб покоїться тіло масою m стало рухатися зі швидкістю v необхідно зробити роботу рівну отриманого значення кінетичної енергії. Якщо тіло масою m рухається зі швидкістю v, То для його зупинки необхідно зробити роботу рівну його первісної кінетичної енергії. При гальмуванні кінетична енергія в основному (крім випадків зіткнення, коли енергія йде на деформації) «забирається» силою тертя.
Теорема про кінетичну енергію: робота рівнодіючої сили дорівнює зміні кінетичної енергії тіла:
Теорема про кінетичну енергію справедлива і в загальному випадку, коли тіло рухається під дією змінюється сили, напрямок якої не збігається з напрямком переміщення. Застосовувати дану теорему зручно в задачах на розгін і гальмування тіла.
Застосовувати дану теорему зручно в задачах на розгін і гальмування тіла.
Потенціальна енергія
Поряд з кінетичної енергією або енергією руху в фізиці важливу роль відіграє поняття потенційної енергії або енергії взаємодії тел.
Потенційна енергія визначається взаємним положенням тел (наприклад, положенням тіла відносно поверхні Землі). Поняття потенційної енергії можна ввести тільки для сил, робота яких не залежить від траєкторії руху тіла і визначається тільки початковим і кінцевим положеннями (так звані консервативні сили). Робота таких сил на замкнутій траєкторії дорівнює нулю. Таким властивістю володіють сила тяжіння і сила пружності. Для цих сил можна ввести поняття потенційної енергії.
Потенційна енергія тіла в полі сили тяжіння Землі розраховується за формулою:
Фізичний сенс потенційної енергії тіла: потенційна енергія дорівнює роботі, яку здійснює сила тяжіння при опусканні тіла на нульовий рівень ( h — відстань від центра ваги тіла до нульового рівня). Якщо тіло має потенційну енергією, значить воно здатне зробити роботу при падінні цього тіла з висоти h до нульового рівня. Робота сили тяжіння дорівнює зміні потенційної енергії тіла, взятому з протилежним знаком:
Якщо тіло має потенційну енергією, значить воно здатне зробити роботу при падінні цього тіла з висоти h до нульового рівня. Робота сили тяжіння дорівнює зміні потенційної енергії тіла, взятому з протилежним знаком:
Часто в задачах на енергію доводиться знаходити роботу по підняттю (перевертання, діставання з ями) тіла. У всіх цих випадках потрібно розглядати переміщення не самого тіла, а тільки його центра ваги.
Потенційна енергія Ep залежить від вибору нульового рівня, тобто від вибору початку координат осі OY. У кожному завданні нульовий рівень вибирається з міркування зручності. Фізичний сенс має не сама потенційна енергія, а її зміна при переміщенні тіла з одного положення в інше. Ця зміна не залежить від вибору нульового рівня.
Потенційна енергія розтягнутої пружини розраховується за формулою:
де: k — жорсткість пружини. Розтягнута (або стисла) пружина здатна привести в рух прикріплене до неї тіло, тобто повідомити цього тіла кінетичну енергію. Отже, така пружина володіє запасом енергії. Розтягування або стиснення х треба розраховувати від недеформованого стану тіла.
Отже, така пружина володіє запасом енергії. Розтягування або стиснення х треба розраховувати від недеформованого стану тіла.
Потенційна енергія пружно деформованого тіла дорівнює роботі сили пружності при переході з даного стану в стан з нульовою деформацією. Якщо в початковому стані пружина вже була деформована, а її подовження дорівнювало x 1, тоді при переході в новий стан з подовженням x 2 сила пружності зробить роботу, рівну зміни потенційної енергії, взятому з протилежним знаком (так як сила пружності завжди спрямована проти деформації тіла):
Потенційна енергія при пружною деформації — це енергія взаємодії окремих частин тіла між собою силами пружності.
Робота сили тертя залежить від пройденого шляху (такий вид сил, чия робота залежить від траєкторії і пройденого шляху називається: дисипативні сили). Поняття потенційної енергії для сили тертя вводити не можна.
Коефіцієнт корисної дії
Коефіцієнт корисної дії (ККД) — характеристика ефективності системи (пристрої, машини) відносно перетворення або передачі енергії.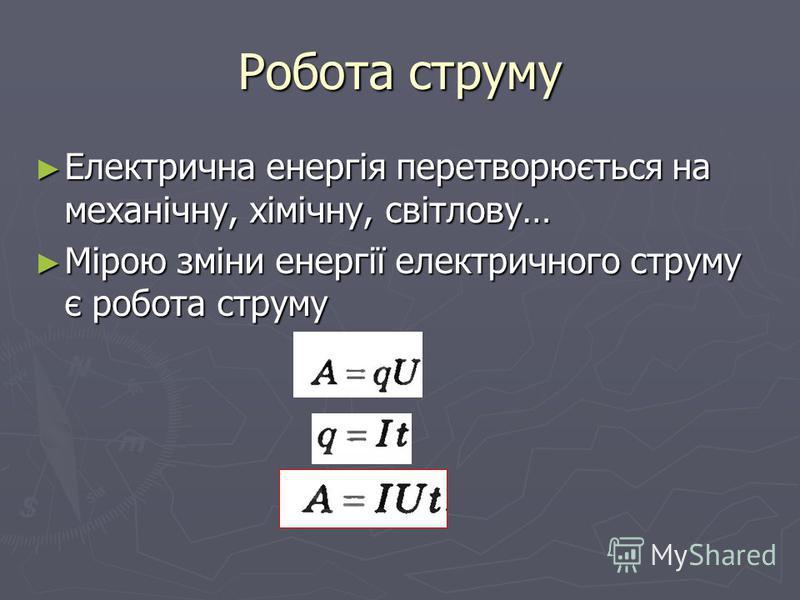 Він визначається відношенням корисно використаної енергії до сумарної кількості енергії, отриманого системою (формула вже приведена вище).
Він визначається відношенням корисно використаної енергії до сумарної кількості енергії, отриманого системою (формула вже приведена вище).
ККД можна розраховувати як через роботу, так і через потужність. Корисна і витрачена робота (потужність) завжди визначаються шляхом простих логічних міркувань.
В електричних двигунах ККД — відношення здійснюваної (корисною) механічної роботи до електричної енергії, одержуваної від джерела. У теплових двигунах — відношення корисної механічної роботи до затрачиваемому кількості теплоти. В електричних трансформаторах — відношення електромагнітної енергії, одержуваної у вторинній обмотці, до енергії, споживаної первинної обмоткою.
В силу своєї спільності поняття ККД дозволяє порівнювати і оцінювати з єдиної точки зору такі різні системи, як атомні реактори, електричні генератори і двигуни, теплоенергетичні установки, напівпровідникові прилади, біологічні об’єкти і т.д.
Через неминучих втрат енергії на тертя, на нагрівання навколишніх тіл і т.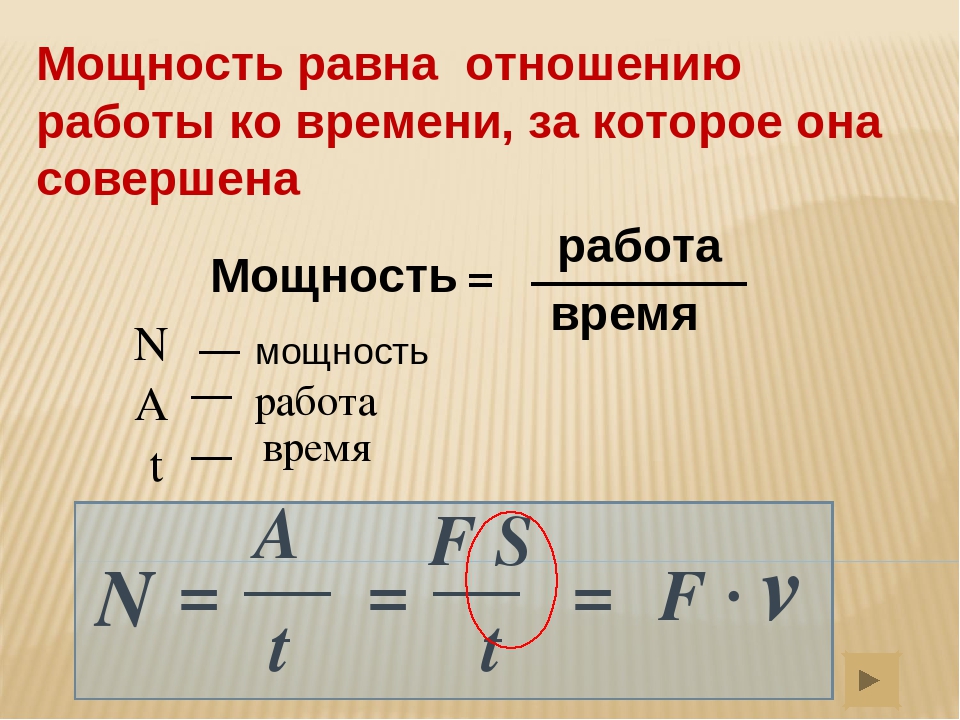 п. ККД завжди менше одиниці. Відповідно до цього ККД виражається в частках затрачуваної енергії, тобто у вигляді правильної дробу або у відсотках, і є безрозмірною величиною. ККД характеризує як ефективно працює машина чи механізм. ККД теплових електростанцій досягає 35-40%, двигунів внутрішнього згоряння з наддувом і попереднім охолодженням — 40-50%, динамомашини і генераторів великої потужності — 95%, трансформаторів — 98%.
п. ККД завжди менше одиниці. Відповідно до цього ККД виражається в частках затрачуваної енергії, тобто у вигляді правильної дробу або у відсотках, і є безрозмірною величиною. ККД характеризує як ефективно працює машина чи механізм. ККД теплових електростанцій досягає 35-40%, двигунів внутрішнього згоряння з наддувом і попереднім охолодженням — 40-50%, динамомашини і генераторів великої потужності — 95%, трансформаторів — 98%.
Завдання, в якій потрібно знайти ККД або він відомий, треба почати з логічного міркування — яка робота є корисною, а яка витраченої.
Закон збереження механічної енергії
Повною механічною енергією називається сума кінетичної енергії (тобто енергії руху) і потенційної (тобто енергії взаємодії тел силами тяжіння і пружності):
Якщо механічна енергія не переходить в інші форми, наприклад, у внутрішню (теплову) енергію, то сума кінетичної і потенційної енергії залишається незмінною. Якщо ж механічна енергія перетворюється на теплову, то зміна механічної енергії дорівнює роботі сили тертя або втрат енергії, або кількістю виділився тепла і так далі, тобто зміна повної механічної енергії дорівнює роботі зовнішніх сил:
Сума кінетичної і потенційної енергії тіл, що складають замкнуту систему (тобто таку в якій не діє зовнішніх сил, і їх робота відповідно дорівнює нулю) і взаємодіючих між собою силами тяжіння і силами пружності, залишається незмінною:
Це твердження виражає закон збереження енергії (ЗСЕ) в механічних процесах. Він є наслідком законів Ньютона. Закон збереження механічної енергії виконується тільки тоді, коли тіла в замкнутій системі взаємодіють між собою силами пружності і тяжіння. У всіх завданнях на закон збереження енергії завжди буде як мінімум два стану системи тел. Закон говорить, що сумарна енергія першого стану буде дорівнює сумарній енергії другого стану.
Він є наслідком законів Ньютона. Закон збереження механічної енергії виконується тільки тоді, коли тіла в замкнутій системі взаємодіють між собою силами пружності і тяжіння. У всіх завданнях на закон збереження енергії завжди буде як мінімум два стану системи тел. Закон говорить, що сумарна енергія першого стану буде дорівнює сумарній енергії другого стану.
Алгоритм рішення задач на закон збереження енергії:
- Знайти точки початкового і кінцевого положення тіла.
- Записати який або якими енергіями має тіло в даних точках.
- Прирівняти початкову і кінцеву енергію тіла.
- Додати інші необхідні рівняння з попередніх тим з фізики.
- Вирішити отримане рівняння або систему рівнянь математичними методами.
Важливо відзначити, що закон збереження механічної енергії дозволив отримати зв’язок між координатами і швидкостями тіла в двох різних точках траєкторії без аналізу закону руху тіла у всіх проміжних точках. Застосування закону збереження механічної енергії може в значній мірі спростити вирішення багатьох завдань.
В реальних умовах практично завжди на рухомі тіла поряд з силами тяжіння, силами пружності і іншими силами діють сили тертя або сили опору середовища. Робота сили тертя залежить від довжини шляху.
Якщо між тілами, складовими замкнуту систему, діють сили тертя, то механічна енергія не зберігається. Частина механічної енергії перетворюється у внутрішню енергію тіл (нагрівання). Таким чином енергія в цілому (тобто не тільки механічна) в будь-якому випадку зберігається.
При будь-яких фізичних взаємодіях енергія не виникає і не зникає. Вона лише перетворюється з однієї форми в іншу. Цей експериментально встановлений факт висловлює фундаментальний закон природи — закон збереження і перетворення енергії.
Одним із наслідків закону збереження і перетворення енергії є твердження про неможливість створення «вічного двигуна» (perpetuum mobile) — машини, яка могла б невизначено довго здійснювати роботу, не витрачаючи при цьому енергії.
Різні завдання на роботу
Якщо в задачі потрібно знайти механічну роботу, то спочатку виберіть спосіб її знаходження:
- Роботу можна знайти за формулою: A = FS∙ cos α
.
 Знайдіть силу, що здійснює роботу, і величину переміщення тіла під дією цієї сили в обраній системі відліку. Зверніть увагу, що кут повинен бути обраний між векторами сили і переміщення.
Знайдіть силу, що здійснює роботу, і величину переміщення тіла під дією цієї сили в обраній системі відліку. Зверніть увагу, що кут повинен бути обраний між векторами сили і переміщення. - Роботу зовнішньої сили можна знайти, як різниця механічної енергії в кінцевій і початковій ситуаціях. Механічна енергія дорівнює сумі кінетичної і потенційної енергій тіла.
- Роботу з підйому тіла з постійною швидкістю можна знайти за формулою: A = mgh, де h — висота, на яку піднімається центр ваги тіла.
- Роботу можна знайти як добуток потужності на час, тобто за формулою: A = Pt.
- Роботу можна знайти, як площа фігури під графіком залежності сили від переміщення або потужності від часу.
Закон збереження енергії і динаміка обертального руху
Завдання цієї теми є досить складними математично, але при знанні підходу вирішуються по абсолютно стандартним алгоритмом. У всіх завданнях Вам доведеться розглядати обертання тіла у вертикальній площині. Рішення буде зводитися до наступній послідовності дій:
Рішення буде зводитися до наступній послідовності дій:
- Треба визначити, що цікавить Вас точку (ту точку, в якій необхідно визначити швидкість тіла, силу натягу нитки, вага і так далі).
- Записати в цій точці другий закон Ньютона, враховуючи, що тіло обертається, тобто у нього є доцентровийприскорення.
- Записати закон збереження механічної енергії так, щоб в ньому була присутня швидкість тіла в тій найцікавішою точці, а також характеристики стану тіла в якомусь стані про яке щось відомо.
- Залежно від умови висловити швидкість в квадраті з одного рівняння і підставити в інше.
- Провести інші необхідні математичні операції для отримання остаточного результату.
При вирішенні завдань треба пам’ятати, що:
- Умова проходження верхньої точки при обертанні на нитки з мінімальною швидкістю — сила реакції опори N у верхній точці дорівнює 0. Таке ж умова виконується при проходженні верхньої точки мертвої петлі.
- При обертанні на стрижні умова проходження всьому колу: мінімальна швидкість у верхній точці дорівнює 0.

- Умова відриву тіла від поверхні сфери — сила реакції опори в точці відриву дорівнює нулю.
непружні зіткнення
Закон збереження механічної енергії і закон збереження імпульсу дозволяють знаходити рішення механічних задач в тих випадках, коли невідомі діючі сили. Прикладом такого роду завдань є ударна взаємодія тіл.
Ударом (або зіткненням) прийнято називати короткочасне взаємодія тіл, в результаті якого їх швидкості відчувають значні зміни. Під час зіткнення тіл між ними діють короткочасні ударні сили, величина яких, як правило, невідома. Тому не можна розглядати ударна взаємодія безпосередньо за допомогою законів Ньютона. Застосування законів збереження енергії та імпульсу в багатьох випадках дозволяє виключити з розгляду сам процес зіткнення і отримати зв’язок між швидкостями тел до і після зіткнення, минаючи всі проміжні значення цих величин.
З ударним взаємодією тел нерідко доводиться мати справу в повсякденному житті, в техніці і в фізиці (особливо у фізиці атома і елементарних частинок). У механіці часто використовуються дві моделі ударного взаємодії — абсолютно пружний і абсолютно непружних удари.
У механіці часто використовуються дві моделі ударного взаємодії — абсолютно пружний і абсолютно непружних удари.
Абсолютно непружним ударом називають таке ударна взаємодія, при якому тіла з’єднуються (злипаються) один з одним і рухаються далі як одне тіло.
При абсолютно непружного ударі механічна енергія не зберігається. Вона частково або повністю переходить у внутрішню енергію тіл (нагрівання). Для опису будь-яких ударів Вам потрібно записати і закон збереження імпульсу, і закон збереження механічної енергії з урахуванням теплоти, що виділяється (попередньо вкрай бажано зробити малюнок).
Абсолютно пружний удар
Абсолютно пружним ударом називається зіткнення, при якому зберігається механічна енергія системи тіл. У багатьох випадках зіткнення атомів, молекул і елементарних частинок підкоряються законам абсолютно пружного удару. При абсолютно пружному ударі поряд з законом збереження імпульсу виконується закон збереження механічної енергії. Простим прикладом абсолютно пружного зіткнення може бути центральний удар двох більярдних куль, один з яких до зіткнення знаходився в стані спокою.
Простим прикладом абсолютно пружного зіткнення може бути центральний удар двох більярдних куль, один з яких до зіткнення знаходився в стані спокою.
центральним ударом куль називають зіткнення, при якому швидкості куль до і після удару спрямовані по лінії центрів. Таким чином, користуючись законами збереження механічної енергії і імпульсу, можна визначити швидкості куль після зіткнення, якщо відомі їх швидкості до зіткнення. Центральний удар дуже рідко реалізується на практиці, особливо якщо мова йде про зіткнення атомів або молекул. При нецентральному пружному зіткненні швидкості частинок (куль) до і після зіткнення не спрямовані по одній прямій.
Окремим випадком нецентрального пружного удару може служити зіткнення двох більярдних куль однакової маси, один з яких до зіткнення був нерухомий, а швидкість другого була спрямована не по лінії центрів куль. В цьому випадку вектори швидкостей куль після пружного зіткнення завжди спрямовані перпендикулярно один до одного.
Закони збереження.
 складні завдання
складні завдання
кілька тел
У деяких завданнях на закон збереження енергії троси за допомогою яких переміщуються якісь об’єкти можуть мати масу (тобто не бути невагомими, як Ви могли вже звикнути). У цьому випадку роботу з переміщення таких тросів (а саме їх центрів тяжіння) також потрібно враховувати.
Якщо два тіла, з’єднані невагомим стрижнем, обертаються у вертикальній площині, то:
- вибирають нульовий рівень для розрахунку потенційної енергії, наприклад на рівні осі обертання або на рівні найнижчої точки знаходження одного з вантажів і обов’язково роблять креслення;
- записують закон збереження механічної енергії, в якому в лівій частині записують суму кінетичної та потенційної енергії обох тел в початковій ситуації, а в правій частині записують суму кінетичної та потенційної енергії обох тел в кінцевій ситуації;
- враховують, що кутові швидкості тіл однакові, тоді лінійні швидкості тел пропорційні радіусів обертання;
- при необхідності записують другий закон Ньютона для кожного з тіл окремо.

розрив снаряда
У разі розриву снаряда виділяється енергія вибухових речовин. Щоб знайти цю енергію треба від суми механічних енергій осколків після вибуху відняти механічну енергію снаряда до вибуху. Також будемо використовувати закон збереження імпульсу, записаний, як теореми косинусів (векторний метод) або у вигляді проекцій на вибрані осі.
Зіткнення з важкої плитою
Нехай назустріч важкої плиті, яка рухається зі швидкістю v, Рухається легкий кульку масою m зі швидкістю u н. Так як імпульс кульки багато менше імпульсу плити, то після удару швидкість плити не зміниться, і вона буде продовжувати рух з тією ж швидкістю і в тому ж напрямку. В результаті пружного удару, кулька відлетить від плити. Тут важливо зрозуміти, що не поміняється швидкість кульки щодо плити. В такому випадку, для кінцевої швидкості кульки отримаємо:
Таким чином, швидкість кульки після удару збільшується на подвоєну швидкість стіни. Аналогічне міркування для випадку, коли до удару кулька і плита рухалися в одному напрямку, призводить до результату згідно з яким швидкість кульки зменшується на подвоєну швидкість стіни:
З фізики і математики, серед іншого, необхідно виконати три найважливіші умови:
- Вивчити всі теми і виконати всі тести і завдання наведені в навчальних матеріалах на цьому сайті.
 Для цього потрібно всього нічого, а саме: присвячувати підготовці до ЦТ з фізики і математики, вивчення теорії та вирішення завдань по три-чотири години щодня. Справа в тому, що ЦТ це іспит де мало просто знати фізику чи математику, потрібно ще вміти швидко і без збоїв вирішувати велику кількість завдань з різних тем і різної складності. Останньому навчитися можна тільки вирішивши тисячі задач.
Для цього потрібно всього нічого, а саме: присвячувати підготовці до ЦТ з фізики і математики, вивчення теорії та вирішення завдань по три-чотири години щодня. Справа в тому, що ЦТ це іспит де мало просто знати фізику чи математику, потрібно ще вміти швидко і без збоїв вирішувати велику кількість завдань з різних тем і різної складності. Останньому навчитися можна тільки вирішивши тисячі задач. - Вивчити всі формули і закони у фізиці, і формули і методи в математиці. Насправді, виконати це теж дуже просто, необхідних формул з фізики всього близько 200 штук, а з математики навіть трохи менше. У кожному з цих предметів є близько десятка стандартних методів вирішення завдань базового рівня складності, які теж цілком можна вивчити, і таким чином, абсолютно на автоматі і без утруднень вирішити в потрібний момент більшу частину ЦТ. Після цього Вам залишиться подумати тільки над найскладнішими завданнями.
- Відвідати всі три етапи репетиційного тестування з фізики та математики.
 Кожен РТ можна відвідувати по два рази, щоб прорешать обидва варіанти. Знову ж на ЦТ, крім уміння швидко і якісно вирішувати завдання, і знання формул і методів необхідно також вміти правильно спланувати час, розподілити сили, а головне правильно заповнити бланк відповідей, що не переплутавши ні номера відповідей і завдань, ні власне прізвище. Також в ході РТ важливо звикнути до стилю постановки питань в задачах, який на ЦТ може здатися непідготовленій людині дуже незвичним.
Кожен РТ можна відвідувати по два рази, щоб прорешать обидва варіанти. Знову ж на ЦТ, крім уміння швидко і якісно вирішувати завдання, і знання формул і методів необхідно також вміти правильно спланувати час, розподілити сили, а головне правильно заповнити бланк відповідей, що не переплутавши ні номера відповідей і завдань, ні власне прізвище. Також в ході РТ важливо звикнути до стилю постановки питань в задачах, який на ЦТ може здатися непідготовленій людині дуже незвичним.
Успішне, старанне і відповідальне виконання цих трьох пунктів дозволить Вам показати на ЦТ відмінний результат, максимальний з того на що Ви здатні.
Знайшли помилку?
Якщо Ви, як Вам здається, знайшли помилку в навчальних матеріалах, то напишіть, будь ласка, про неї на пошту. Написати про помилку можна також в соціальній мережі (). У листі вкажіть предмет (фізика або математика), назва або номер теми або тесту, номер завдання, або місце в тексті (сторінку) де на Вашу думку є помилка. Також опишіть в чому полягає приблизна помилка. Ваш лист не залишиться непоміченим, помилка або буде виправлена, або Вам роз’яснять чому це не помилка.
Ваш лист не залишиться непоміченим, помилка або буде виправлена, або Вам роз’яснять чому це не помилка.
Как рассчитать прямую кинематику робота за 5 простых шагов
Расчет прямой кинематики часто является первым шагом к использованию нового робота. Но с чего начать?
Несмотря на то, что в Интернете есть несколько хороших руководств, до сих пор не существовало простого пошагового руководства для расчета прямой кинематики.
Вот простое руководство по расчету кинематики любого робота-манипулятора.
[С тех пор, как я впервые опубликовал эту статью в 2015 году, она стала одной из наших самых популярных статей! С тех пор я обновил и улучшил его, но простота ядра осталась прежней..]
Расчет кинематики — краеугольный камень инженеров-робототехников. Но кинематика иногда может быть проблемой (например, понимание разницы между прямой и обратной кинематикой).
Когда я впервые начал заниматься исследованиями в области робототехники, мне часто говорили: «пойдите и вычислите прямую кинематику этого робота». Фраза — это, по сути, сокращение от в исследованиях робототехники «пойди и познакомься с этим роботом».
Фраза — это, по сути, сокращение от в исследованиях робототехники «пойди и познакомься с этим роботом».
Расчет прямой кинематики — важный первый шаг при использовании любого нового робота в исследованиях, особенно для манипуляторов.
Хотя я изучал теорию кинематики в университете, только когда я рассчитал различные кинематические решения для нескольких реальных роботов, весь процесс стал интуитивно понятным. Даже тогда, поскольку я не рассчитывал кинематику каждый день, мне приходилось возвращаться к своим заметкам, чтобы напоминать себе, как это делать каждый раз, когда я сталкивался с новым роботом.
Было бы очень полезно иметь пошаговое руководство, через которое нужно пройти. Таким образом, мне не пришлось бы читать сотни страниц академически написанных уравнений в учебниках.
Этакая «шпаргалка» по кинематике пригодилась бы.
Этот пост как раз и есть шпаргалка.
Я в первую очередь сосредоточусь на подходе Деванита-Хартенберга (DH) к прямой кинематике, поскольку он наиболее распространен.
Надеюсь, вам понравится!
Шаг 1. Возьмите карандаш и бумагу
Может возникнуть соблазн сразу броситься к компьютеру, когда начинаешь работать с новым роботом. Однако, даже если робот выглядит как «стандартный» манипулятор 6R (самый распространенный тип роботов), я всегда сажусь с карандашом и бумагой, чтобы нарисовать кинематическую диаграмму.
Эта простая задача заставляет вас тщательно рассмотреть фактическую физическую конфигурацию робота, избегая ложных предположений, которые могут нанести ущерб позже во время кодирования.
Есть несколько способов нарисовать кинематическую цепь. Выберите тот стиль, который вам больше нравится.
Я предпочитаю простые цилиндры для шарнирных соединений и линии для звеньев, как показано на изображении. Выполните поиск картинок Google по запросу «кинематическая диаграмма» и посмотрите некоторые из доступных стилей.
Во время рисования определите, в какую сторону движется каждый сустав, и нарисуйте это движение в виде двусторонних стрелок на диаграмме.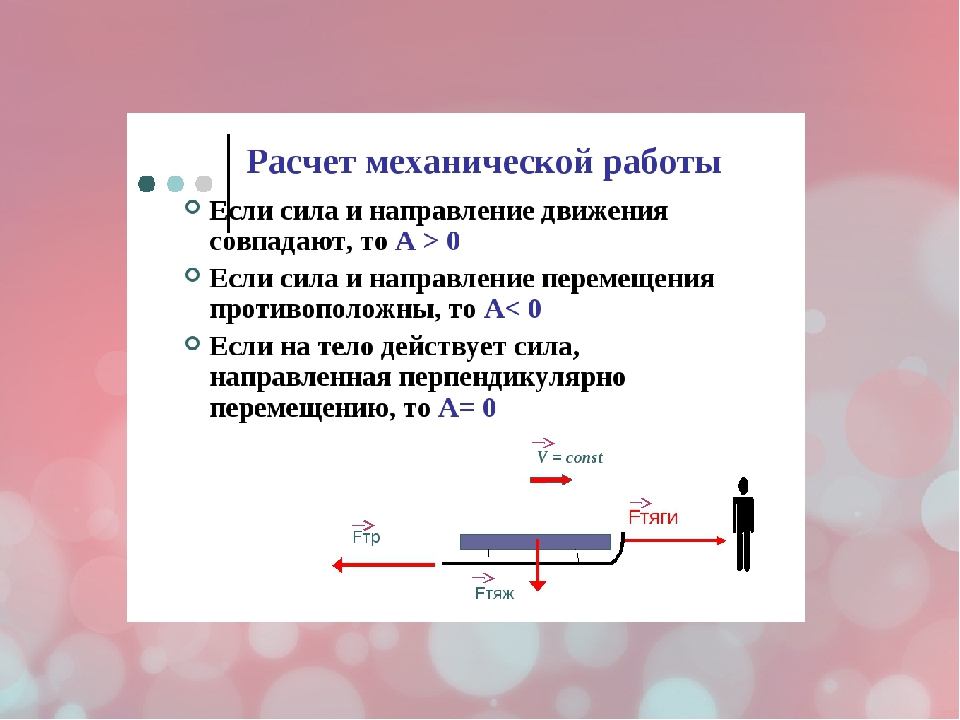
Шаг 2: Определите свои оси
Следующим ключевым шагом является нанесение осей на каждое соединение. Подход DH присваивает разные оси каждому подвижному суставу.
Если правильно настроить оси, работать с роботом будет легко. Неправильно настроив их, вы будете страдать от бесчисленных головных болей. Эти оси потребуются симуляторам, решателям обратной кинематики и вашим коллегам в вашей команде (никто не захочет решать решение с прямой кинематикой, если это уже сделал кто-то другой).
Посмотрите это видео, чтобы узнать, как их настроить:
Две важные оси, над которыми нужно работать:
- Ось Z — Ось Z должна лежать на оси вращения для поворотного шарнира или оси растяжения для призматического шарнира.
- Ось X — Ось x должна лежать вдоль «общей нормали», которая является самой короткой ортогональной линией между предыдущей осью z и текущей осью z (серьезно, посмотрите видео).
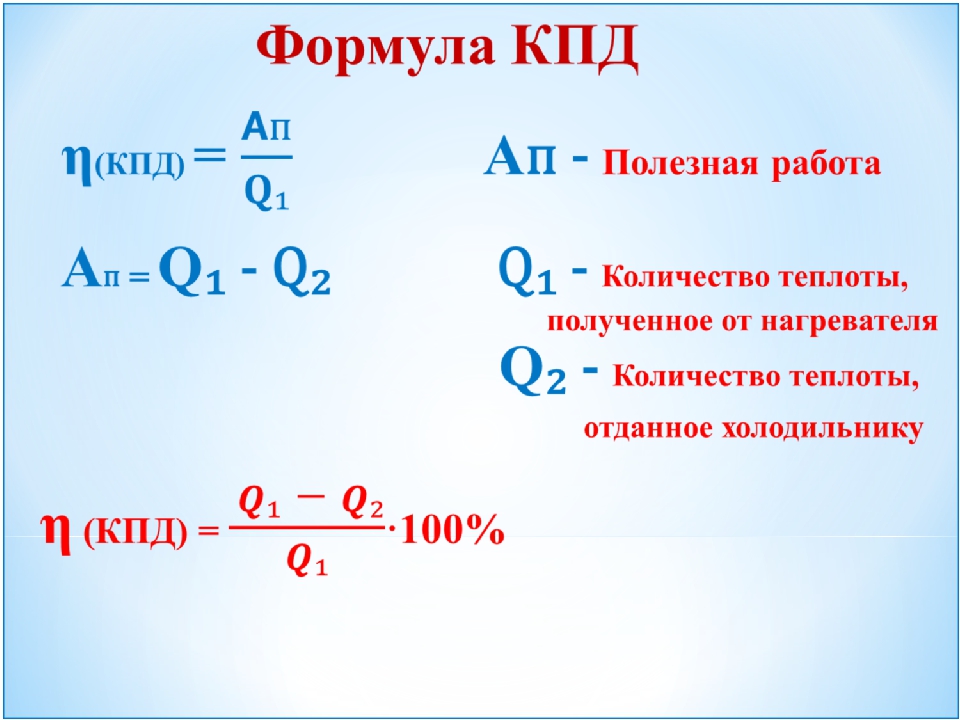
- Ось Y — После того, как вы рассчитали два других, эта ось должна встать на место, следуя «правилу правой руки» (см. Ниже).
Лично я рисую оси, используя следующую расцветку: ось z (синий) , ось x (красный) и ось y (зеленый) . Между прочим, это схема раскраски, которая используется в визуализаторе RViz от ROS, который я активно использовал во время своей докторской диссертации.
Еще когда я был студентом, наш лектор посоветовал нам сделать осевую «скульптуру» из трех цветных соломок, вставленных в сферу из синей кнопки, чтобы объяснить нам теорию.Хотя это может показаться немного «детской школой», это может быть очень полезно, поскольку вы можете расположить скульптуру рядом с физическим роботом, чтобы убедиться, что оси у вас направлены в правильном направлении. Чтобы получить виртуальную версию этого, воспользуйтесь этим интерактивным инструментом.
В качестве альтернативы вы можете использовать «правило правой руки».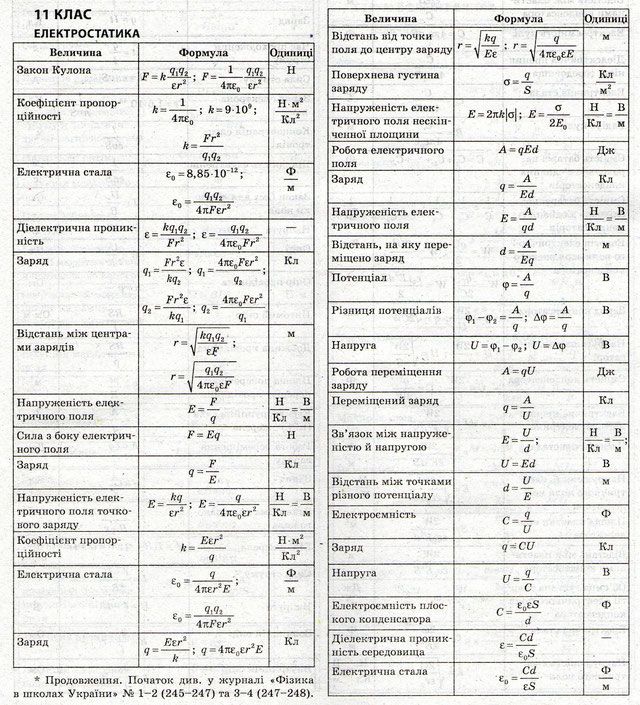
Правое правило
Быстрый и простой способ запомнить направление оси Y — следовать правилу правой руки. Это мнемоника (вспомогательная память), широко используемая в физике для запоминания ориентации трехмерной оси.
Чтобы использовать его, протяните правую руку перед собой, выставив большой, указательный и средний пальцы под углом 90 градусов друг к другу. Таким образом, каждый палец соответствует оси:
.- Thumb = ось z.
- Указательный палец = ось x.
- Средний палец = ось y.
Если направить большой и указательный пальцы так, чтобы они следовали осям z и x шарнира робота, ваш средний палец естественным образом попадет в направление оси y.
Шаг 3. Запомните свой конечный эффектор
Цель расчета прямой кинематики — вычислить позу конечного эффектора по положению суставов.
В большинстве учебных пособий по прямой кинематике конечный эффектор рассматривается как единичное расстояние от конечного соединения. Это нормально для простого захвата «открыть-закрыть». Однако, поскольку современные захваты зачастую сложнее этого, стоит задуматься о том, как работает конечный эффектор.
Это нормально для простого захвата «открыть-закрыть». Однако, поскольку современные захваты зачастую сложнее этого, стоит задуматься о том, как работает конечный эффектор.
Например, адаптивный захват с тремя пальцами Robotiq имеет несколько различных режимов захвата. Каждый режим будет соответствовать немного другой желаемой позе конечного эффектора. Если вы хотите зажать объект между пальцами, это потребует другого расстояния, чем если бы вы хотели обернуть пальцы вокруг объекта.
При построении кинематической модели всегда следует внимательно относиться к концевому эффектору.
Шаг 4: Рассчитайте параметры ЦТ
ПараметрыДенавита-Хартенберга (DH) часто требуются для ввода модели робота в симулятор и начала выполнения на ней любого вида анализа.
Лучший способ визуализировать параметры DH — это посмотреть видео, которое я уже включил выше.
Параметры DH разбивают каждое соединение робота на четыре параметра, каждый из которых берется со ссылкой на предыдущий шарнир. Они рассчитываются относительно «общей нормы», описанной выше. Обратите внимание, что если предыдущая ось z пересекает текущую ось z, что часто бывает, общая нормаль имеет нулевую длину.
Они рассчитываются относительно «общей нормы», описанной выше. Обратите внимание, что если предыдущая ось z пересекает текущую ось z, что часто бывает, общая нормаль имеет нулевую длину.
- d — расстояние между предыдущей осью x и текущей осью x вдоль предыдущей оси z.
- θ — угол вокруг оси z между предыдущей осью x и текущей осью x.
- a (или r) — длина общей нормали, которая является расстоянием между предыдущей осью z и текущей осью z
- α — угол вокруг общей нормали между предыдущей осью z и текущей осью z.
Просмотрите каждое соединение на своем чертеже и запишите параметры DH для каждого соединения. У каждого сустава должно быть одно значение, которое является переменной, представляющей задействованный сустав.
Для более подробного объяснения и некоторых примеров я рекомендую этот раздаточный материал Питера Корке или эту главу из Введение в робототехнику.
Альтернативы параметрам ЦТ
Подход DH — наиболее распространенный подход к прямой кинематике, но он не идеален. Одним из его недостатков является то, что он не очень элегантно обрабатывает параллельные оси z. Существуют различные альтернативы, включая представления по теории винтов, модели Хаяти-Робертса и другие геометрические модели (см. Эту статью для сравнения).Это могут быть (а могут и не быть) лучшие подходы. Однако большинство кинематических библиотек принимают параметры DH, и по этой причине это разумный подход для начала.
Шаг 5: Объедините параметры в один робот
Последний шаг — объединить все ваши параметры DH в единого робота. Есть два способа сделать это: сложный и легкий:
Трудный путь: создайте свой собственный решатель
«Пуристский» метод использования параметров DH — это «накатать свой собственный» решатель прямой кинематики с использованием вашего любимого языка программирования.Я сам использовал этот подход в прошлом, хотя, вероятно, не стал бы делать это в наши дни.
Когда у вас есть параметры DH для каждого сустава, вы можете использовать этот метод, чтобы закодировать его в решателе прямой кинематики:
- Найдите библиотеку на вашем языке программирования, которая позволяет выполнять умножение матриц. В качестве альтернативы можно написать собственный код, используя методы из этого списка.
- Для каждого сустава робота заполните новую матрицу 4 x 4 следующими значениями:
- Перемножьте все матрицы вместе, начиная с первого сустава и заканчивая концевым эффектором.
- Последний вектор T будет содержать положение концевого эффектора. Матрица R будет содержать ориентацию концевого эффектора.
Если вы просто хотите попробовать это с некоторыми значениями, не кодируя собственный решатель, вы можете использовать этот удобный онлайн-инструмент для создания рабочего примера полного робота на основе его параметров DH.
По моему опыту, создание собственного решателя не дает намного больше преимуществ, чем использование существующей библиотеки. Однако это хорошее обучающее упражнение.
Однако это хорошее обучающее упражнение.
Простой способ: использовать существующие библиотеки
Гораздо более эффективный способ расчета прямой кинематики, когда у вас есть параметры DH, является использование существующей библиотеки.
Существует множество кинематических программных библиотек, и многие из них делают гораздо больше, чем просто вычисляют прямую кинематику. Большинство из них включают в себя решатели обратной кинематики, динамику, визуализацию, планирование движения и обнаружение столкновений, и это лишь некоторые функции. Эти библиотеки преобразуют ваши параметры DH в матрицы, которые затем умножаются вместе, чтобы вычислить взаимосвязь между положениями суставов и позой конечного эффектора.
Некоторые хорошие библиотеки для разработки включают Robotics Library, Orocos Kinematics and Dynamics Library, ROS MoveIt, OpenRave, RoboAnalyzer и Matlab Robotics Toolbox.
Даже если для фактического управления роботом обычно требуется обратная кинематика, вычисление прямой кинематики является необходимым шагом для знакомства с любой новой роботизированной рукой.
Если вы нашли эту статью полезной, не забудьте добавить ее в закладки, чтобы вы могли найти ее при следующей встрече с новым роботом!
Какой ваш любимый метод знакомства с кинематикой нового робота? Вы предпочитаете другой метод параметрам DH? У вас есть вопросы по реализации прямой кинематики в вашем роботе? Расскажите нам в комментариях ниже или присоединитесь к обсуждению в LinkedIn, Twitter или Facebook.
Трение скольжения: определение, формула и примеры — видео и стенограмма урока
Формула трения скольжения
Уравнение трения скольжения по плоской поверхности довольно простое — это коэффициент трения скольжения, умноженный на нормальную силу.
Нормальная сила сбивает Ганса с толку до тех пор, пока он не осознает, что «нормаль» — это научный термин, означающий перпендикулярно поверхности или под прямым углом. В большинстве книг уравнение приводится в наклонной плоскости. Однако Ганс игнорирует это, поскольку все битвы происходят на плоской поверхности.
В большинстве книг уравнение приводится в наклонной плоскости. Однако Ганс игнорирует это, поскольку все битвы происходят на плоской поверхности.
Увеличение трения скольжения
Ганс размышляет обо всех фактах, которые он узнал о трении скольжения, и о том, что они значат для его сражений с роботами. Поскольку есть только пара способов увеличить трение скольжения, есть только пара способов, которыми Ганс может улучшить своего робота: утяжелив его или изменив материалы.
Добавление дополнительных колес к его роботу для увеличения тяги, о чем он думал, не поможет.Он также не может увеличить вес своего робота, хотя это приведет к увеличению трения скольжения. Добавление большего веса также переместит его в следующую весовую категорию, чего Ханс не хочет делать прямо сейчас.
Единственное, что он может сделать, это изменить тип шин, которые он использует. Он проведет небольшое исследование и посмотрит, есть ли шины с лучшим коэффициентом трения скольжения, чем те, которые у него сейчас.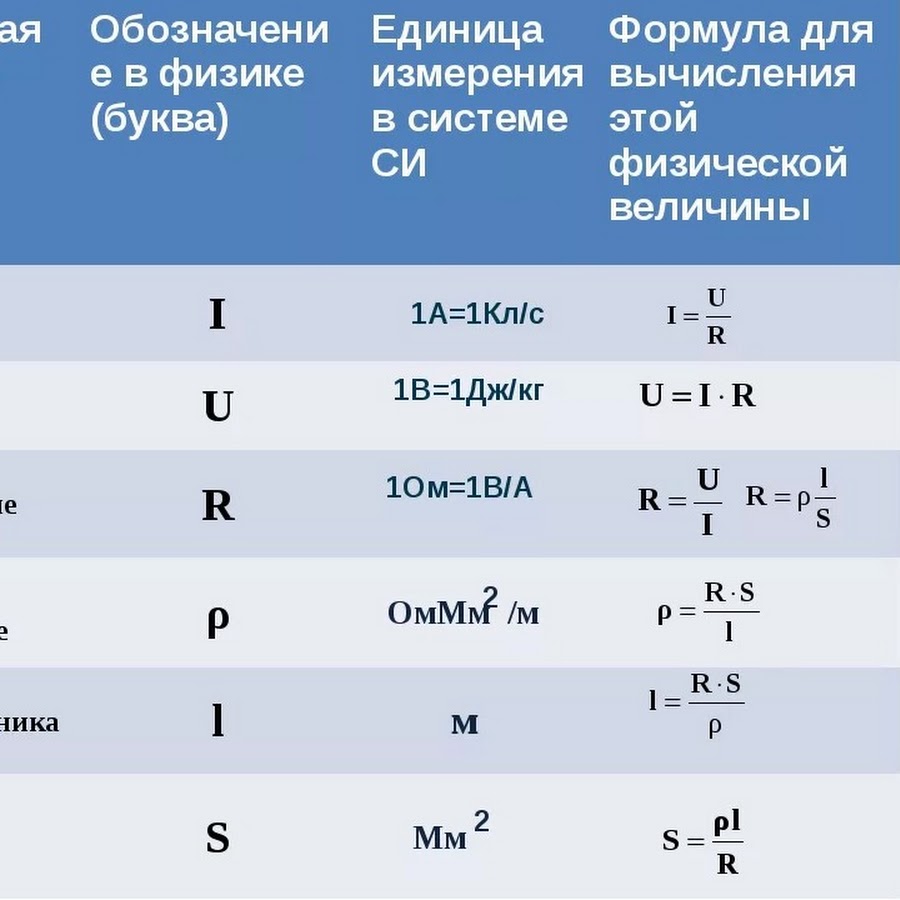
Примеры задач
Робот, которого Ганс использует в битвах, весит 25 кг, а коэффициент трения скольжения между его текущими шинами и бетоном, на котором он сражается, равен 0.6. Какая сила требуется, чтобы его робот двигался, если он уже скользил из-за маневра со стороны Хана? Используйте ускорение свободного падения как g = 9,8 м / с / с, чтобы вычислить это.
(9,8) (25) (0,6) = 147 ньютонов
На какой процент увеличится эта сила, если он сможет найти шину с коэффициентом трения скольжения 0,8 в том же сценарии? Чтобы узнать, сначала вычислите новую силу:
(9,8) (25) (0,8) = 196 Ньютонов.
Затем получите увеличение в%:
(196 — 147) / 147 = 33%
С этой новой информацией Ганс решает, что использовать шины с коэффициентом трения скольжения 0.8 поможет его роботу не так легко толкать его, и, возможно, даже поможет его роботу выиграть больше битв, будучи тем, кто толкает других роботов.
Краткое содержание урока
Трение скольжения , кинетическое трение или трение движения — это сила, необходимая для поддержания движения двух поверхностей относительно друг друга. Величина этой силы зависит только от двух факторов для немикроскопических ситуаций: коэффициента трения скольжения между двумя материалами и нормальной силы.Нормальная сила — это сила, перпендикулярная рассматриваемым поверхностям.
Величина этой силы зависит только от двух факторов для немикроскопических ситуаций: коэффициента трения скольжения между двумя материалами и нормальной силы.Нормальная сила — это сила, перпендикулярная рассматриваемым поверхностям.
Обратная кинематика для 2-шарнирной руки робота с использованием геометрии
Мы видели этого простого двухзвенного робота в предыдущей лекции о прямой кинематике. Поза всплывающей подсказки этого робота описывается просто двумя числами, координатами x и y относительно мировой системы координат. Итак, проблема здесь в том, что по x и y мы хотим определить соединенные углы, Q1 и Q2. Решение, которому мы собираемся следовать в этом конкретном разделе, является геометрическим.Мы начнем с простой конструкции. Мы собираемся наложить красный треугольник поверх нашего робота. Мы знаем, что координаты конечной точки — это x, y, поэтому вертикальная высота треугольника равна y, а ширина по горизонтали — x. И, используя теорему Пифагора, мы можем написать, что r в квадрате равно x в квадрате плюс y в квадрате. Пока все просто.
Пока все просто.
Теперь мы посмотрим на этот треугольник, выделенный здесь красным, и мы хотим определить угол альфа. Для этого нам нужно использовать правило косинуса.И, если вы немного устали с правилом косинусов, вот вам немного напоминания. У нас есть произвольный треугольник. Нам не обязательно иметь в нем прямые углы, и мы собираемся обозначить длину этого края как A, а угол, противоположный этому краю, мы будем обозначать как маленький a. И мы делаем то же самое для этого края, этого угла, этого края и этого угла. Итак, все вместе стороны обозначены заглавными буквами A, B и C, а углы — маленькими a, маленькими b и маленькими c. Итак, правило косинуса — это просто эти отношения.Это немного похоже на теорему Пифагора, за исключением этого дополнительного члена в конце с cos a в нем.
А теперь применим правило косинусов к конкретному треугольнику, который мы рассматривали только что. Записать эти конкретные отношения довольно просто. Мы можем выделить термин cos alpha, который дает нам интересующий нас угол альфа. И он определяется в терминах постоянной длины звена, A1 и A2, и положения концевого эффектора, x и y. Мы можем записать это простое соотношение между углами альфа и Q2.И мы знаем из формы функции косинуса, что cos Q2 должен быть равен отрицательному значению cos alpha. На этот раз давайте просто напишем выражение для косинуса соединенного угла Q2. Теперь мы нарисуем еще один красный треугольник и применим здесь простую тригонометрию. Если мы знаем Q2, то мы знаем эту длину и эту длину красного треугольника. Мы можем записать это соотношение для синуса соединенного угла Q2.
И он определяется в терминах постоянной длины звена, A1 и A2, и положения концевого эффектора, x и y. Мы можем записать это простое соотношение между углами альфа и Q2.И мы знаем из формы функции косинуса, что cos Q2 должен быть равен отрицательному значению cos alpha. На этот раз давайте просто напишем выражение для косинуса соединенного угла Q2. Теперь мы нарисуем еще один красный треугольник и применим здесь простую тригонометрию. Если мы знаем Q2, то мы знаем эту длину и эту длину красного треугольника. Мы можем записать это соотношение для синуса соединенного угла Q2.
Теперь мы можем рассмотреть этот больший треугольник, угол которого равен бета, а длина стороны треугольника показана здесь синим цветом.А длина другой стороны треугольника такая. Итак, теперь мы можем написать выражение для угла бета через эти параметры здесь. Возвращаясь к красному треугольнику, который мы нарисовали ранее, мы можем установить связь между Q1 и углом бета. Представьте еще один угол, эту гамму, и мы сможем записать взаимосвязь между гаммой угла и координатами всплывающей подсказки x и y. Теперь мы можем написать простую взаимосвязь между построенными нами углами, гаммой и бета, и интересующим нас соединенным углом, который равен Q1.И общие отношения выглядят примерно так.
Теперь мы можем написать простую взаимосвязь между построенными нами углами, гаммой и бета, и интересующим нас соединенным углом, который равен Q1.И общие отношения выглядят примерно так.
Довольно сложная взаимосвязь, она дает нам угол соединенного сустава, это Q1 в терминах координат конечного эффектора y и x, и набор констант, a1 и a2, а также это функция угла второго сустава, Q2. . Итак, давайте резюмируем то, что мы здесь получили. У нас есть выражение для косинуса Q2 и выражение для Q1. Теперь функция косинуса симметрична относительно 0. Итак, если мы знаем значение косинуса Q2, тогда есть два возможных решения: положительный угол и отрицательный угол.Мы собираемся явно выбрать положительный угол, а это значит, что я могу написать это выражение здесь. И теперь у нас есть то, что мы называем обратным кинематическим решением для этого двухзвенного робота. У нас есть выражение для двух соединенных углов Q1 и Q2 в терминах позы концевого эффектора x и y, а также набор констант.
Вы заметили, что эти два уравнения не независимы. Фактически, уравнение для Q1 зависит от решения для Q2. В этом случае Q2 отрицательно, и мы собираемся записать решение для Q2 со знаком минус перед обратным косинусом.Теперь нам нужно решить для Q1, поэтому мы собираемся представить этот конкретный красный треугольник, угол бета, который мы решили ранее, и гамму угла, которая определяется в терминах y и x. Теперь мы пишем несколько иное соотношение между Q1, гаммой и бета, отличное от того, что было раньше. Речь идет о смене знака. Затем мы можем заменить все предыдущее уравнение и придумать это выражение для Q1. Опять же, здесь смена вывески. Раньше это было отрицательным знаком.
И здесь в краткой форме представлено решение обратной кинематики нашего двухзвенного робота, когда он находится в этой конкретной конфигурации, где Q2 отрицательно. Давайте сравним два решения: случай, когда Q2 положительный, и случай, когда Q2 отрицательный.
Физика ужасающей технологической тактики боевого робота
О, вам нужен пример бота с замедленным вращением? Есть Скорпиос и Красный Дьявол — оба слабые.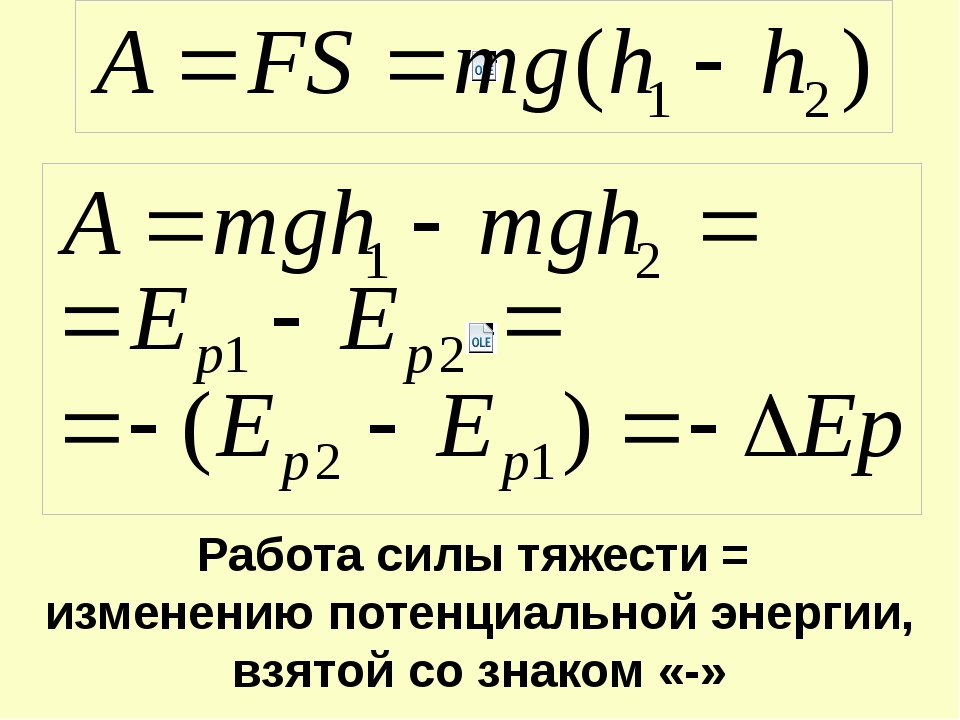
Угловой момент
Что, черт возьми, такое угловой момент? Вот более подробное объяснение, но пока я просто скажу, что угловой момент — это свойство, связанное с вращающимися объектами.Если вы хотите изменить ось, вдоль которой вращается объект, вам необходимо приложить крутящий момент (крутящую силу).
Да, это правда — большинство людей не имеют повседневного опыта с угловым моментом. Одно место, где вы, возможно, видели его эффекты, — это прядильщик непоседы (эта вращающаяся игрушка на пальцах). Возможно, это одна из причин, по которой интересно играть. Вращающийся спиннер имеет больший угловой момент, чем невращающийся. Это означает, что для его переворота требуется больше крутящего момента. Это просто странно, потому что мы привыкли к этому угловому моменту.
Робот с вращающимся диском также обладает угловым моментом. Вы действительно можете увидеть это с ботами с вертикальным вращением. Чтобы изменить направление движения робота, вам понадобится дополнительный крутящий момент, чтобы вы могли изменить ось вращения вращающегося диска. Это может привести к некоторым странным случаям, когда робот фактически наклоняется на бок при повороте. Честно говоря, физика этих наклонных движений может быть немного сложной. Возможно, я вернусь к этому в более позднем посте.
Это может привести к некоторым странным случаям, когда робот фактически наклоняется на бок при повороте. Честно говоря, физика этих наклонных движений может быть немного сложной. Возможно, я вернусь к этому в более позднем посте.
Hammer Bots
Взгляните еще раз на битву между Минотавром и Кузнецом.Да, Blacksmith — это робот с молотком. Они кажутся популярными — я полагаю, потому что молотки просто круто выглядят. О, они еще могут разбивать вещи. Но как молоток по сравнению с вертикальным вертушкой? Единственный явный недостаток — это энергия. Качающийся молот может набирать энергию только во время взмаха (обычно короткого времени). Чтобы увеличить энергию удара, бот может увеличить массу молота, чтобы компенсировать более низкую скорость во время замаха (по сравнению с вертушкой).
Но молот с большой массой создает новую проблему — импульс.Импульс — это произведение массы и скорости объекта, и он не меняется, если на этот объект не действует внешняя сила. Итак, если вы считаете, что у робота есть тело и молот, общий импульс должен оставаться на нуле, когда он сидит на полу. Как только молот падает, масса его головки начинает двигаться вниз. Чтобы сделать общий импульс бота нулевым, остальная часть робота (тело) должна иметь восходящий импульс. Вы можете увидеть это с Кузнецом (и другими молотами-ботами).Если повернуть вниз слишком сильно, робот двинется вверх. Это цена, которую вы платите за тяжелый молот.
Как только молот падает, масса его головки начинает двигаться вниз. Чтобы сделать общий импульс бота нулевым, остальная часть робота (тело) должна иметь восходящий импульс. Вы можете увидеть это с Кузнецом (и другими молотами-ботами).Если повернуть вниз слишком сильно, робот двинется вверх. Это цена, которую вы платите за тяжелый молот.
Wedge Bots
Думаю, мне стоит сказать кое-что о клине. Идея состоит в том, чтобы сделать наклонного робота, который мог бы подхватить других роботов и перевернуть их. Но что тут сказать? Это кажется довольно простым. Я полагаю, что большим преимуществом клин-ботов является то, что они довольно просты (без качающихся молотков или вращающихся дисков).
Конечно, за этими боевыми ботами стоит еще больше физики, но это всего лишь введение.На самом деле, я мог бы сделать целый курс физики, посвященный только BattleBots. Возможно, мне придется это сделать в будущем.
Как построить робота Учебные пособия
Преобразование энергии (и потери от)
Преобразование энергии — это когда одна форма энергии превращается в другую форму энергии.
 Например, аккумулятор вашего робота хранит химическую энергию. Когда вы прикрепляете мотор
в вашу батарею эта химическая энергия преобразуется в вращательные двигатели, которые затем
создает вращательную механическую энергию.
Например, аккумулятор вашего робота хранит химическую энергию. Когда вы прикрепляете мотор
в вашу батарею эта химическая энергия преобразуется в вращательные двигатели, которые затем
создает вращательную механическую энергию.Как конструктор роботов, вы хотите иметь как можно меньше возможных конверсий. Почему это? Потому что никакое преобразование не дает 100% эффективности. Вот почему моторы нагреваются — потери тепловой энергии, не приносящие пользы! На самом деле вы обычно можете ожидайте, что эффективность большинства конверсий составит от 30% до 70%. Это огромная потеря в энергии!
Позвольте мне привести вам хороший пример, конкретный пример, который вам следует уметь относиться к. И я прошу прощения за тех, кто думает электромобили спасут мир.. .
Итак, предположим, я спрашиваю вас, что более эффективно, электромобиль или автомобиль с бензиновым двигателем?
Я бы сказал, что автомобиль с бензиновым двигателем значительно эффективнее,
и, следовательно, тратит гораздо меньше энергии. На чем основаны мои аргументы? Что ж,
эффективность преобразования энергии!
На чем основаны мои аргументы? Что ж,
эффективность преобразования энергии!
Начнем с того, как запитать электромобиль:
Уголь на электростанции (химическая энергия) сжигается (тепловая энергия) для расширения водяного пара до
вращать турбину (механическая энергия), которая действует как генератор для производства электричества
(электрическая энергия), которая затем сохраняется в автомобильном аккумуляторе (химическая энергия)
а затем используется для питания двигателей автомобиля (электрическая энергия) для обеспечения механического движения (механическая энергия).2 = 0,49 = КПД 49%
Я хочу подчеркнуть, что это упрощенный пример, а не доказательство того, что автомобили с бензиновым двигателем загрязняют меньше / больше, чем
электромобили.
В действительности типичный КПД преобразования типичной электростанции составляет около 30%,
с еще большими потерями при транспортировке электроэнергии по линиям электропередач. Двигатели внутреннего сгорания имеют
очень низкий КПД. Кроме того, возникают еще большие потери энергии, например, при транспортировке бензина / угля в различные места и т. Д.
Кроме того, возникают еще большие потери энергии, например, при транспортировке бензина / угля в различные места и т. Д.
Итак, если вы хотите рассчитать потерю конверсии для робота с батарейным питанием, вы бы сказали:
-
90% батареи на электричество
60% электричества приходится на механическое движение
Следовательно:
-
Энергия батареи после преобразования = Battery_Energy * КПД A * КПД B. . .
или
= Энергия_батареи * .9 * .6
Итак, чтобы рассчитать потерю энергии при преобразовании,
-
Battery_Energy * (1 — эффективность A * эффективностьB) = потеря энергии
Окончательное уравнение
Суммируя все, что вы узнали, мы можем теперь составить общее уравнение для расчета
требуемая энергия для вашего робота:
-
Required_Energy
= 2 * Кинетическая_энергия
+ Potential_Energy
+ Energy_Losses
+ Conversion_Losses
или заполнить:
-
Required_Energy
= масса * скорость ^ 2
+ масса * сила * высота
+ deceleration_rate * пройденное расстояние * (1/2 * масса * скорость ^ 2)
+ Battery_Energy * (1 — эффективностьA * эффективностьB)
или решено для Battery_Energy:
-
напряжение * мАч * 60 * 60/1000
= масса * (скорость ^ 2 + сила тяжести * высота
+ deceleration_rate * пройденное расстояние * 1/2 * скорость ^ 2)
/ (эффективностьA * эффективностьB)
Если ваш робот делает много движений остановки / запуска, умножьте Required_Energy
на это количество движений, а расстояние равно расстоянию между каждым движением.
Насколько мы уверены ?. Давайте представим простую игру. Предположим… | Дилхан Мадуранга
Давайте представим простую игру. Предположим, у нас есть крошечный игрушечный робот, который может делать шаг вперед на один сантиметр каждую секунду, он питается от батареи, и мы только что заменили батареи. Если мы аккуратно поместим его на ровную поверхность и дадим ему поработать (или прогуляться) в течение 1 часа, то мы обнаружим, что он переместился на 3600 сантиметров (или 36 метров), плюс-минус пару сантиметров.
Мы уже исключили некоторые странные возможности, например, новые батарейки были поддельными и они разрядились через несколько минут, или наша кошка (или собака, или лошадь) нашла эту маленькую игрушку интересной и выбросила ее, или идет в экстремальный уровень — какой-то инопланетный корабль прибывает из ниоткуда, чтобы просто похитить эту игрушку.Тем не менее, когда мы принимаем идеальную ситуацию, мы уверены в движении игрушечного робота. Мы можем взять наш калькулятор и вычислить его положение или скорость в любую секунду в течение часа. Мы даже можем предсказать его будущее движение с помощью некоторых приближений и приложить дополнительные усилия, чтобы применить простые уравнения движения физики, чтобы получить те же результаты и быть уверенными, что они согласуются с нашими наблюдениями. В двух словах, мы ОПРЕДЕЛЕННО относимся к движению игрушечного робота.
Мы даже можем предсказать его будущее движение с помощью некоторых приближений и приложить дополнительные усилия, чтобы применить простые уравнения движения физики, чтобы получить те же результаты и быть уверенными, что они согласуются с нашими наблюдениями. В двух словах, мы ОПРЕДЕЛЕННО относимся к движению игрушечного робота.
Мы можем применить простые уравнения движения физики, чтобы получить те же результаты и убедиться, что они согласуются с нашими наблюдениями.
Уверенность — важный факт нашего мира , нашей жизни . Все хотят быть уверены в том, что они делают. Мы ожидаем, что авиадиспетчер и пилоты будут уверены и точны в своих расчетах посадки, поэтому посадка будет настолько безопасной, насколько мы хотим. Компании хотят быть уверенными и точными в своих показателях продаж, чтобы принимать решения и делать прогнозы на будущее. Всякий раз, когда мы повышаем точность наблюдаемых данных и методов расчетов, прогнозы становятся все лучше и лучше, мы становимся все более и более уверенными в наших наблюдениях, а следовательно, и в методах.
Смысл этой уверенности состоит в том, что мы считаем уверенность свойством природы. Мы верим в реальность уверенности. Мы не одиноки в этом, даже великие ученые / философы представляли то же самое, даже великий физик Эйнштейн. В 1814 году французский математик Пьер-Симон Лаплас опубликовал свои мысли о достоверности.
«Мы можем рассматривать нынешнее состояние Вселенной как следствие ее прошлого и причину ее будущего. Интеллект, который в определенный момент знал бы все силы, приводящие в движение природу, и все положения всех элементов, из которых состоит природа, если бы этот интеллект был также достаточно обширен, чтобы представить эти данные для анализа, он бы объединил в одной формуле движения величайших тел вселенной и мельчайшего атома; для такого интеллекта ничто не было бы неопределенным, и будущее, как и прошлое, было бы перед его глазами — Пьер Симон Лаплас, «Философское эссе о вероятностях»
Эта гипотетическая идея долгое время была широко принята в обществе. Это не для обсуждения точности его утверждения, но на самом деле это означает, что мир был готов принять детерминизм / определенность. Они верили в достоверность.
Это не для обсуждения точности его утверждения, но на самом деле это означает, что мир был готов принять детерминизм / определенность. Они верили в достоверность.
Это правда? Можем ли мы быть так уверены во Вселенной? Что ж, похоже, природе это не нравится! В 1926 году Вернер Гейзенберг математически сформулировал фундаментальное свойство природы, названное принципом неопределенности Гейзенберга, также известным как принцип неопределенности. Он говорит, что есть пределы нашей способности одновременно измерять определенные наборы данных, такие как положение и скорость частицы.Другими словами, если мы измеряем положение частицы с предельной точностью, мы получим крайнюю ошибку измерения ее скорости. Несмотря на то, что ошибка в этих измерениях может быть незначительной для огромных объектов, таких как планеты, спортсмены, мячи для гольфа или автомобили, она становится критической на атомных уровнях. Например, предположим, что мы хотим измерить положение электрона, нам может потребоваться направить луч света, чтобы увидеть его на месте. Сияние светодиодного фонарика нашего телефона не заставляет стол двигаться, но на микроскопическом уровне это означает, что вы снова и снова бомбардируете электрон световой энергией, что в результате изменит его скорость.В основном система была нарушена нашим наблюдением (световой луч). Мы не можем знать точное состояние того электрона, которое пытались наблюдать. Согласно принципу неопределенности, независимо от того, насколько вы умны или точны, вы не можете знать точное состояние Вселенной на этом фундаментальном микроскопическом уровне. Как можно предсказать что-либо с абсолютной точностью? Это означает, что мы не можем осуществить мечту Лапласа.
Сияние светодиодного фонарика нашего телефона не заставляет стол двигаться, но на микроскопическом уровне это означает, что вы снова и снова бомбардируете электрон световой энергией, что в результате изменит его скорость.В основном система была нарушена нашим наблюдением (световой луч). Мы не можем знать точное состояние того электрона, которое пытались наблюдать. Согласно принципу неопределенности, независимо от того, насколько вы умны или точны, вы не можете знать точное состояние Вселенной на этом фундаментальном микроскопическом уровне. Как можно предсказать что-либо с абсолютной точностью? Это означает, что мы не можем осуществить мечту Лапласа.
В основном система была нарушена нашим наблюдением.
Этот принцип неопределенности хорошо согласуется со странной и умопомрачительной квантовой физикой, которая является еще одной гипотезой, которая замечательно хороша для объяснения микроскопических уровней.Говорят, что предсказания, сделанные на основе этих теорий до сих пор, никогда не были ошибочными!
Современная физика требует, чтобы мы согласились с тем, что неопределенность является основным фундаментальным законом природы.
Это может быть причиной того, что вселенная и природа такие динамичные и интересные.
Я считаю, что неповторимая красота природы и различия между вами и мной являются результатом этой глубинной неуверенности (плюс другие причины, которых наука до сих пор не знает). Возьмите две розы, они не одинаковые.Даже однояйцевые близнецы не на 100% одинаковы. Фундаментальная неопределенность Вселенной не позволяет им стать идентичными, даже если они начинаются с одинакового происхождения. Эти микроскопические вариации и колебания в конечном итоге вызывают макроскопические различия, адаптации, эволюции и все, что нас окружает.
Живя в мире, в котором мы стараемся быть все более и более уверенными в вещах, это не означает, что быть уверенным — это неправильно. На самом деле, когда это возможно, быть уверенным и точным — это замечательно.Но разве мы не должны иметь в своем уме такое понимание «ничто в этой вселенной не является определенным и совершенным» ? В этой вселенной нет ничего реального, все они построены на неопределенности и вероятности.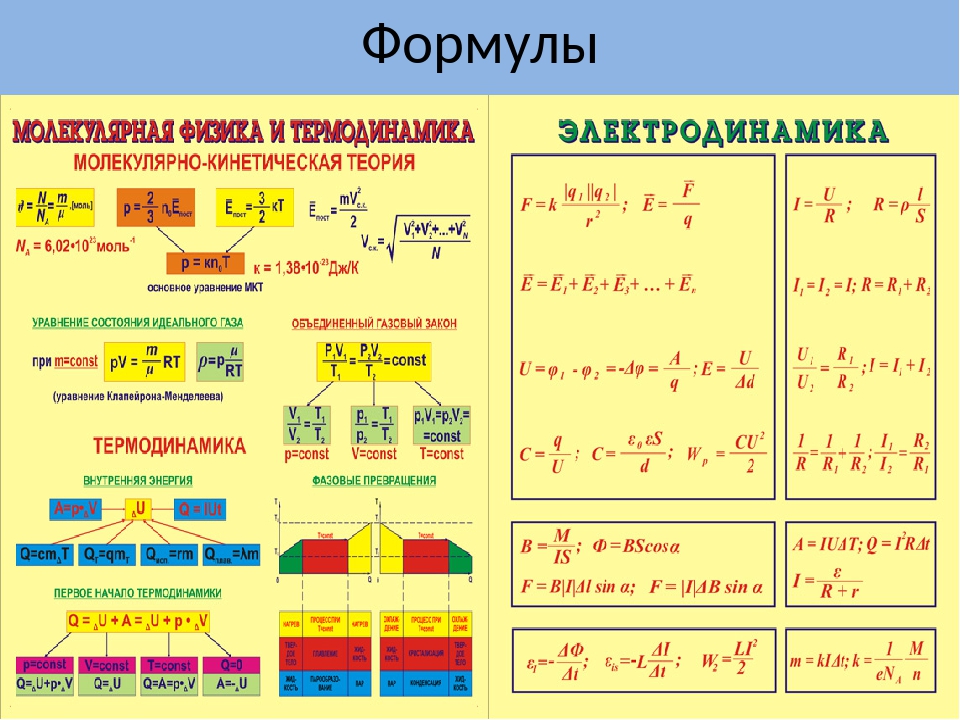 (кажется, что неопределенность и вероятность сами по себе нереальны!). Если что-то неожиданно пойдет не так, отпустите. Это наша природа. Если дела пойдут хорошо, замечательно! Вы создали что-то (почти) определенное из основных блоков неопределенности! Если мы примем это простое явление, , тогда мы сможем, конечно, , , быть счастливыми!
(кажется, что неопределенность и вероятность сами по себе нереальны!). Если что-то неожиданно пойдет не так, отпустите. Это наша природа. Если дела пойдут хорошо, замечательно! Вы создали что-то (почти) определенное из основных блоков неопределенности! Если мы примем это простое явление, , тогда мы сможем, конечно, , , быть счастливыми!
Параметрические уравнения — гипертекст по физике
Обсуждение
аналитическая геометрия
В предыдущих разделах мы обсуждали, как кинематические переменные расстояния, смещения, скорости, скорости и ускорения могут использоваться для анализа движения по прямой.При одномерном движении движущиеся объекты имеют только одну степень свободы. Это, конечно, идеализация. Когда я выхожу из квартиры на тротуар, я должен принять одно решение…
Но я не какой-то управляемый компьютером робот, которого определение «тротуар» заставляет выбирать только между этими двумя вариантами. У меня также есть возможность двигаться вперед или назад; то есть через улицу или обратно в мою квартиру.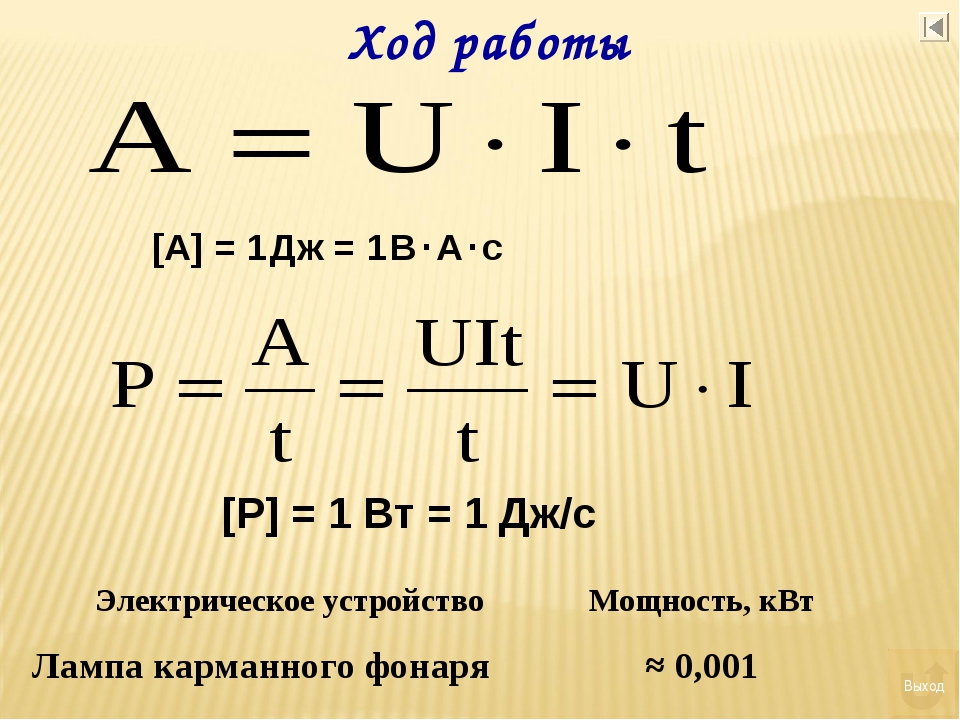 Эта вторая степень свободы делает ходьбу двумерной деятельностью.Если я пойду достаточно далеко, моя высота также обязательно изменится, поэтому вы можете рассматривать ходьбу как трехмерное занятие, но это просто реакция на поверхность Земли.
Эта вторая степень свободы делает ходьбу двумерной деятельностью.Если я пойду достаточно далеко, моя высота также обязательно изменится, поэтому вы можете рассматривать ходьбу как трехмерное занятие, но это просто реакция на поверхность Земли.
С другой стороны, полет — это поистине трехмерное занятие; особенно для пилотов вертолетов и колибри. У летающих людей и животных всегда есть три варианта выбора…
| вперед или | назад? |
| слева или | верно? |
| вверх или | не работает? |
или, если хотите…
| север или | юг? |
| восток или | запад? |
| вверх или | не работает? |
Эти варианты исключают друг друга — свойство, известное как ортогональность , .Два направления являются ортогональными , если нет возможности, чтобы движение по одному из этих направлений могло привести к движению в любом из других направлений. Идите на восток или запад сколько хотите, вы никогда не увидите никаких изменений в вашем положении с севера на юг. Вот почему ходьба обычно не считается трехмерным занятием. Свобода идти «вверх» или «вниз» с холма — это на самом деле просто свобода выбора между движением «вперед» или «назад». Этот один вариант приводит к движению вверх, а другой — к движению вниз, кажется, больше зависит от поверхности Земли, чем в любом другом выборе с моей стороны.Я действительно не могу решить «подъехать» во время ходьбы так же, как я могу решить «повернуть налево».
Идите на восток или запад сколько хотите, вы никогда не увидите никаких изменений в вашем положении с севера на юг. Вот почему ходьба обычно не считается трехмерным занятием. Свобода идти «вверх» или «вниз» с холма — это на самом деле просто свобода выбора между движением «вперед» или «назад». Этот один вариант приводит к движению вверх, а другой — к движению вниз, кажется, больше зависит от поверхности Земли, чем в любом другом выборе с моей стороны.Я действительно не могу решить «подъехать» во время ходьбы так же, как я могу решить «повернуть налево».
Ортогональные направления всегда перпендикулярны друг другу. Поскольку «перпендикулярный» — вполне подходящее слово, «ортогональный» может показаться излишне претенциозным. Дело в том, что размерность относится к большему, чем просто количеству независимых направлений. Любые две измеримые вещи, не зависящие друг от друга, можно считать измерениями. В термодинамике (изучение тепла и работы) давление и объем ведут себя так же, как в кинематике движение вверх-вниз и влево-вправо.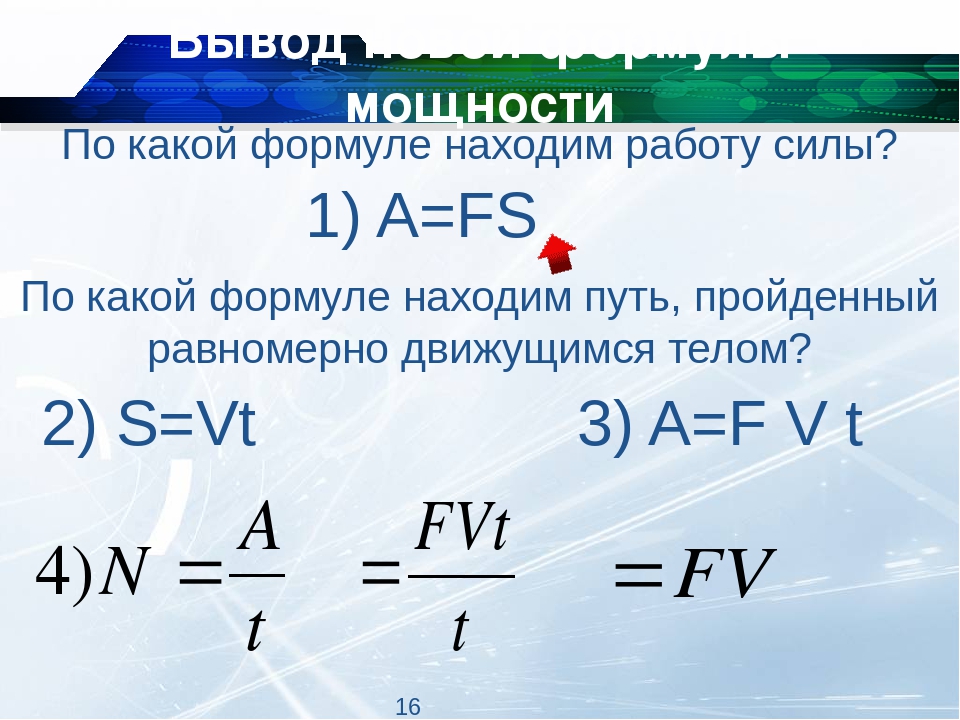 Ситуация здесь немного сложнее, чем просто сказать «давление не зависит от объема», но должно быть очевидно, что утверждение «давление перпендикулярно объему» не имеет никакого смысла. Однако правильно сказать, что «давление ортогонально объему».
Ситуация здесь немного сложнее, чем просто сказать «давление не зависит от объема», но должно быть очевидно, что утверждение «давление перпендикулярно объему» не имеет никакого смысла. Однако правильно сказать, что «давление ортогонально объему».
Определение подходящих перпендикулярных направлений в кинематической задаче — один из первых шагов в ее решении. Присоедините эти направления (называемые осями , ) к точке в пространстве (называемой исходной точкой , ), и вы только что создали систему координат .Для именования осей нет правила, но по традиции принято называть основное горизонтальное направление + x . Однако названия других направлений открыты для обсуждения. Курсы физики в старших классах обычно концентрируются на двумерных задачах. Инструктор может использовать + y для перпендикулярного горизонтального направления в одном случае и затем использовать + y для вверх в другом. Профессора колледжей, как правило, более формальны и обычно оставляют + y для перпендикулярного горизонтального направления и + z для верхнего. Я склонен думать, что если ситуация строго двумерна, то другое направление должно быть + y , независимо от того, каким может быть это направление. Я использую только + z , когда необходимо учитывать все три измерения. Дело в том, что физика не имеет значения. Вселенная изотропна . Все законы физики всегда верны без изменений, независимо от того, где вы размещаете начало координат, как вы ориентируете оси (конечно, если они перпендикулярны) или как вы их называете.Поскольку это не имеет значения, почему бы не облегчить себе жизнь? Поместите исходную точку в любом удобном месте и обозначьте оси как хотите. Вам даже не нужно называть их x , y и z . Вот несколько альтернативных названий топоров, которые я видел как используемые…
Я склонен думать, что если ситуация строго двумерна, то другое направление должно быть + y , независимо от того, каким может быть это направление. Я использую только + z , когда необходимо учитывать все три измерения. Дело в том, что физика не имеет значения. Вселенная изотропна . Все законы физики всегда верны без изменений, независимо от того, где вы размещаете начало координат, как вы ориентируете оси (конечно, если они перпендикулярны) или как вы их называете.Поскольку это не имеет значения, почему бы не облегчить себе жизнь? Поместите исходную точку в любом удобном месте и обозначьте оси как хотите. Вам даже не нужно называть их x , y и z . Вот несколько альтернативных названий топоров, которые я видел как используемые…
a , b и c
i , j и k
горизонтально и вертикально
параллельно (∥) и перпендикулярно (⊥)
r , θ и φ
ζ и ξ
Поскольку все перпендикулярные направления ортогональны и поскольку любая векторная величина может быть разделена на компоненты вдоль этих направлений, n-мерное движение может быть полностью описано с помощью одномерных алгебраических выражений n в перпендикулярных направлениях n (где n — любое целое число больше нуля). Таким образом, двумерное движение может быть полностью описано двумя одномерными алгебраическими выражениями в двух перпендикулярных направлениях, обычно называемых x и y .
Таким образом, двумерное движение может быть полностью описано двумя одномерными алгебраическими выражениями в двух перпендикулярных направлениях, обычно называемых x и y .
Когда ситуация по существу двумерна, положение объекта может быть адекватно описано двумя числами (его координаты x и y ), скорость объекта двумя числами ( x и y компонентов его скорости), а его ускорение — двумя числами (компоненты ускорения x и y ).Согласно теореме Пифагора, величины этих величин связаны следующими выражениями…
| r 2 = | x 2 | + | y 2 |
| v 2 = | v x 2 | + | v y 2 |
| 2 = | a x 2 | + | a y 2 |
Отношение более полно описано в векторной записи, где векторы со шляпкой ( ̂ ) над ними являются единичными векторами вдоль осей координат…
| r = | x | – | + | y | ĵ |
| v = | v x | – | + | v y | ĵ |
| = | a x | – | + | a y | ĵ |
Поскольку кинематические векторы под прямым углом не зависят друг от друга, с каждым направлением связаны функции перемещения, средней скорости и среднего ускорения…
| x = | x ( т ) | |
| v x = | ∆ x | |
| ∆ т | ||
| a x = | ∆ v x | |
| ∆ т |
| y = | y ( t ) | |
| v y = | ∆ y | |
| ∆ т | ||
| a y = | ∆ v y | |
| ∆ т |
Аналогичные функции могут быть получены для мгновенной скорости и мгновенного ускорения…
| x = | x ( т ) | |
| v x = | ∆ x | |
| ∆ т | ||
| a x = | ∆ v x | |
| ∆ т |
| y = | y ( t ) | |
| v y = | ∆ y | |
| ∆ т | ||
| a y = | ∆ v y | |
| ∆ т |
Или на языке математики…
| x = | x ( т ) | ||
| v x = | dx | ||
| дт | |||
| a x = | дв x | = | d 2 x |
| дт | дт 2 |
| y = | y ( t ) | ||
| v y = | ди | ||
| дт | |||
| a y = | дв y | = | d 2 y |
| дт | дт 2 |
Точно так же трехмерное движение может быть полностью описано тремя одномерными алгебраическими выражениями вдоль трех взаимно перпендикулярных направлений, обычно называемых x , y и z . Поскольку Вселенная имеет три пространственных измерения, положение объекта можно полностью описать тремя числами (его координаты x , y и z ), скорость объекта — тремя числами ( x , y и z компонентов его скорости), и его ускорение по трем числам (компоненты ускорения x , y и z ). Согласно теореме Пифагора, величины этих величин связаны следующими выражениями…
Поскольку Вселенная имеет три пространственных измерения, положение объекта можно полностью описать тремя числами (его координаты x , y и z ), скорость объекта — тремя числами ( x , y и z компонентов его скорости), и его ускорение по трем числам (компоненты ускорения x , y и z ). Согласно теореме Пифагора, величины этих величин связаны следующими выражениями…
| r 2 = | x 2 | + | y 2 | + | z 2 |
| v 2 = | v x 2 | + | v y 2 | + | v z 2 |
| 2 = | a x 2 | + | a y 2 | + | a z 2 |
Отношение более полно описано в векторной записи, где векторы со шляпкой (^) над ними являются единичными векторами вдоль осей координат…
| r = | x | – | + | y | ĵ | + | z | кО |
| v = | v x | – | + | v y | ĵ | + | v z | кО |
| = | a x | – | + | a y | ĵ | + | a z | кО |
Поскольку кинематические векторы под прямым углом не зависят друг от друга, с каждым направлением связаны функции перемещения, средней скорости и среднего ускорения…
| x = | x ( т ) | |
| v x = | ∆ x | |
| ∆ т | ||
| a x = | ∆ v x | |
| ∆ т |
| y = | y ( t ) | |
| v y = | ∆ y | |
| ∆ т | ||
| a y = | ∆ v y | |
| ∆ т |
| z = | z ( t ) | |
| v z = | ∆ z | |
| ∆ т | ||
| a z = | ∆ v z | |
| ∆ т |
Аналогичные функции могут быть получены для мгновенной скорости и мгновенного ускорения…
| x = | x ( т ) | |
| v x = | ∆ x | |
| ∆ т | ||
| a x = | ∆ v x | |
| ∆ т |
| y = | y ( t ) | |
| v y = | ∆ y | |
| ∆ т | ||
| a y = | ∆ v y | |
| ∆ т |
| z = | z ( t ) | |
| v z = | ∆ z | |
| ∆ т | ||
| a z = | ∆ v z | |
| ∆ т |
Или на языке математики…
| x = | x ( т ) | ||
| v x = | dx | ||
| дт | |||
| a x = | дв x | = | d 2 x |
| дт | дт 2 |
| y = | y ( t ) | ||
| v y = | ди | ||
| дт | |||
| a y = | дв y | = | d 2 y |
| дт | дт 2 |
| z = | z ( t ) | ||
| v z = | дз | ||
| дт | |||
| a z = | дв z | = | d 2 z |
| дт | дт 2 |
Это приложение алгебры к геометрии известно под несколькими названиями, из которых аналитическая геометрия , пожалуй, наиболее распространенная, а координатная геометрия занимает второе место.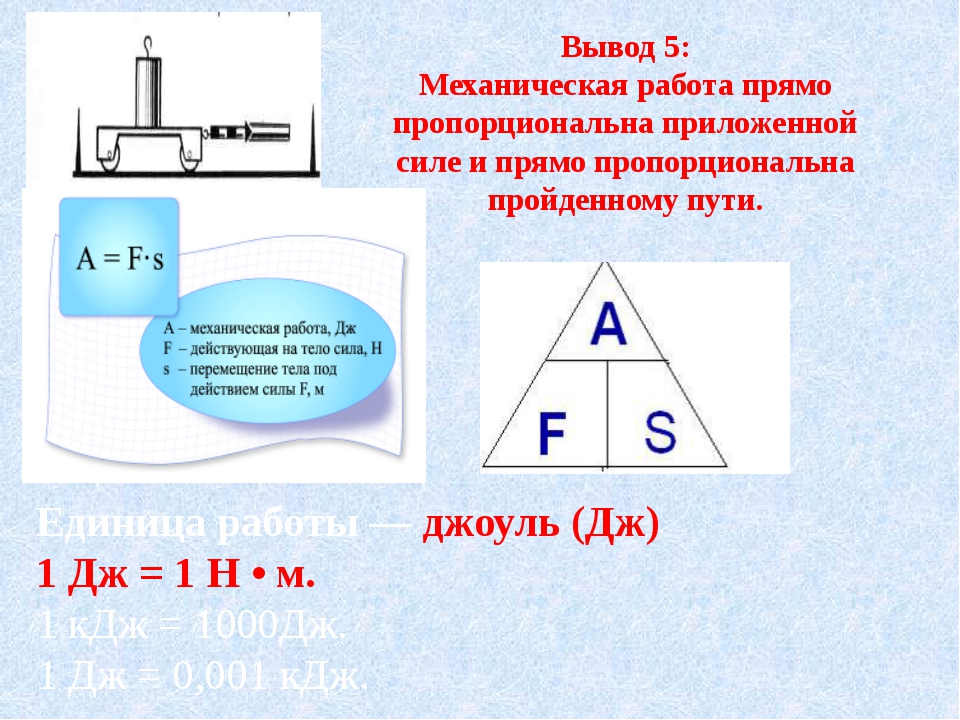 Поскольку человеком, которому обычно приписывают открытие этого предмета, был французский философ и математик Рене Декарт (1596–1650), его часто также называют декартовой геометрией в его честь. Хотя Декарт был первым, кто опубликовал свои мысли по этому поводу, он почти наверняка был независимо открыт примерно в то же время другим французским математиком, Пьером де Ферма (1601–1665).
Поскольку человеком, которому обычно приписывают открытие этого предмета, был французский философ и математик Рене Декарт (1596–1650), его часто также называют декартовой геометрией в его честь. Хотя Декарт был первым, кто опубликовал свои мысли по этому поводу, он почти наверняка был независимо открыт примерно в то же время другим французским математиком, Пьером де Ферма (1601–1665).
Уравнения аналитической геометрии соответствуют кривым и поверхностям.Типичная кривая описывается функцией, которая генерирует значение на оси y из каждого значения на оси x . Типичная поверхность описывается функцией, которая генерирует значение по оси z из каждой пары координат x — y . Кинематические уравнения описываются несколько иначе. Положение движущегося объекта меняется со временем. Поскольку значения x , y и z зависят от дополнительного параметра (времени), который не является частью системы координат, кинематические уравнения также известны как параметрические уравнения .
Альберт Эйнштейн (1879–1955) перевернул физику с ног на голову, удалив время из списка параметров и добавив его в список координат. Это было центральным положением его знаменитой теории относительности ; эта тема будет обсуждаться более подробно позже в этой книге. Согласно Эйнштейну, Вселенная не трехмерна с тремя координатами — x , y и z — она четырехмерна с четырьмя координатами — x , y , z и t. .Нам кажется, что объекты движутся только потому, что мы увлечены течением времени. Если бы мы могли видеть время так же, как видим длину, то движущиеся объекты выглядели бы как жесткие кривые, зафиксированные в пространстве — четырехмерном пространстве, включающем время, которое называется пространство-время . В некотором смысле теория относительности упразднила движение.
Разные примечания
- Мгновенная скорость всегда касается кривой.
- Ускорение имеет как тангенциальную, так и нормальную / радиальную / центростремительную составляющую.
- Функция — это математическое соотношение, которое отображает одно выходное значение на одно входное значение. Многие кривые в декартовой плоскости можно описать функцией y = f ( x ). Некоторые кривые не могут. Одним из способов решения этой проблемы может быть использование обратной функции для построения кривой x = f −1 ( y ). Иногда даже это не работает. Например, попробуйте нарисовать круг. Уравнение r 2 = x 2 + y 2 работает, но его нельзя преобразовать в функцию.Преобразованное уравнение y = ± √ ( r 2 — x 2 ) его не сокращает. Он отображает одно значение x на два значения y . Мне нужна честная функция, а не какое-то мутантное уравнение, которое побудило бы меня обратиться за профессиональной помощью к математику. Мне нужно что-то настолько простое, что с этим справится физик, или, что еще лучше, уравнение, настолько простое, что с этим справится компьютер.
 Одно число на входе, одно число на выходе. Ну… не совсем один номер .Что мне действительно нужно, так это одно число внутри и одно местоположение вне, одно место на декартовой плоскости, одна ( x , y ) пара координат. Я могу сделать это, параметризовав кривую — превратив координаты x и y в отдельные функции третьей переменной, параметрической переменной, обычно обозначаемой буквой t , потому что лучший физический смысл для нее — время . Я не говорю «лучший» бесцеремонно. Я говорю лучше, потому что имею в виду лучшее — лучшее для нас, физиков и тех, кто изучает физику.Параметризация кривой во времени придает ей физическую реальность.
Одно число на входе, одно число на выходе. Ну… не совсем один номер .Что мне действительно нужно, так это одно число внутри и одно местоположение вне, одно место на декартовой плоскости, одна ( x , y ) пара координат. Я могу сделать это, параметризовав кривую — превратив координаты x и y в отдельные функции третьей переменной, параметрической переменной, обычно обозначаемой буквой t , потому что лучший физический смысл для нее — время . Я не говорю «лучший» бесцеремонно. Я говорю лучше, потому что имею в виду лучшее — лучшее для нас, физиков и тех, кто изучает физику.Параметризация кривой во времени придает ей физическую реальность.
- Эта пара уравнений покажет вам, где находится объект в пространстве в любой момент времени. Если бы я был хорош, я мог бы настроить этот компьютер, чтобы показать вам, как эта штука бродит в небольшом фильме.
- Ух ты! Фильм. Почему это тысяча картинок, а картинка стоит тысячи слов.

