
Кинематика. Формулы
Кинематика. Формулы| Номер | Название формулы | Запись формулы | Примечание |
| (1) | Закон равноускоренного криволинейного движения | vS0 — модуль начальной скорости; aS — ускорение | |
| (2) | Скорость равномерного прямолинейного движения | ||
| (3) | Скорость | ||
| (4) | Ускорение | ||
| (5) | Касательное ускорение | dv = dl/dt, т.е. путевая скорость вдоль рассматриваемой траектории | |
| (6) | Нормальное ускорение | ||
| (7) | Скорость свободного падения тела | ||
| (8) | Время тела при свободном падении | ||
| (9) | Время при равномерном движении по окружности | ||
| (10) | Скорость равномерного движения по окружности | ||
| (11) | Угловая (мгновенная) скорость равномерного движения по окружности | Единица измерения угловой скорости — радианы в секунду | |
| (12) | Скорость равноускоренного движения по окружности | ||
| (13) | Угловая (мгновенная) скорость равноускоренного движения по окружности |
— версия для печати
- Определение
- Кинематикой называется раздел физики, занимающийся исследованием законов движения идеальных тел
- Пояснение
- Под чертой вверху буквы подразумевается знак вектора.
| Если у вас есть мысли или идеи по поводу данной таблицы или, например, вы считаете, что полезно было бы создать определенную вспомогательную памятку, то мы обязательно рассмотрим ваше предложение, которое можно изложить по ссылке (где вы также можете поделиться с нами любыми мыслями по поводу сайта scolaire.ru). Мы готовы устранить любые неудобства, связанные с использованием данной таблицы, или ей подобных, которые можно найти в разделе «Физика». |
© Школяр. Лингвистика (при поддержке «Ветвистого древа») 2009—2016
Механика. Формулы по физике — Физика для всех
Кинематика
| Обозначение | Измеряется в | Описание |
|---|---|---|
| S | м | пройденный путь |
| v | м/с | скорость |
| t | с | время |
| x | м | координата |
| a | м/с2 | ускорение |
| ω | с-1 | угловая скорость |
| T | с | период |
| ν | Гц | частота |
| ε | с-2 | угловое ускорение |
| R | м | радиус |
Скорость и ускорение:
Равномерное движение: ν = const
Равнопеременное движение:
Криволинейное движение:
Вращательное движение:
Динамика и статика
| Обозначение | Измеряется в | Описание |
|---|---|---|
| F | Н | сила |
| P | кг*м/с | импульс |
| a | м/с2 | ускорение |
| m | кг | масса |
| v | м/с | скорость |
| p | Н | вес тела |
| g | м/с2 | ускорение свободного падения |
| E | Дж | энергия |
| A | Дж | работа |
| N | Вт | мощность |
| t | с | время |
| I | кг*м2 | момент инерции |
| L | кг*м2/с | момент импульса |
| M | Н*м | момент силы |
| ω | с-1 | угловая скорость |
Первый закон Ньютона:
При ∑ F = 0 => v = const
Второй закон Ньютона:
Третий закон Ньютона:
Основной закон динамики для неинерциальных систем отчета.
ma=ma0+Fинерц ,где а- ускорение в неинерциальной а0— в инерциальной системе отчета.
Скорость центра масс:
Закон всемирного тяготения:
Вес тела:
Сила трения:
Закон Гука:
Закон Гука: σ = Eε, где Е- модуль Юнга.
Динамика и статика вращательного движения:
| система | ось | I |
| точка по окружности | ось симметрии | mR2 |
| стержень | через середину | 1/12 mR2 |
| стержень | через конец | 1/3 mR2 |
| шар | через центр шара | 2/5 mR2 |
| сфера | через центр сферы | 2/3 mR2 |
| кольцо или тонкостенный цилиндр | ось симметрии | mR2 |
| диск сплошной цилиндр | ось симметрии | 1/2 mR2 |
Условие равновесия тел ∑ M = 0
Закон сохранения импульса:
Потенциальная и кинетическая энергия. Мощность:
Мощность:
Закон сохранения энергии:
Основные формулы по физике — МЕХАНИКА
Формулы механики. Механика делится на три раздела: кинематику, динамику и статику. В разделе кинематика рассматриваются такие кинематические характеристики движения, как перемещение, скорость, ускорение. Здесь необходимо использовать аппарат дифференциального и интегрального исчисления.
В основе классической динамики лежат три закона Ньютона. Здесь необходимо обратить внимание на векторный характер действующих на тела сил, входящих в эти законы.
Динамика охватывает такие вопросы, как закон сохранения импульса, закон сохранения полной механической энергии, работа силы.
При изучении кинематики и динамики вращательного движения следует обратить внимание на связь между угловыми и линейными характеристиками. Здесь вводятся понятия момента силы, момента инерции, момента импульса и рассматривается закон сохранения момента импульса.
Смотрите также основные формулы по термодинамике
Таблица основных формул по механике
|
Физические законы, формулы, переменные |
Формулы механики |
||||
|
Скорость мгновенная: где r — радиус-вектор материальной точки, t — время;
|
|||||
|
Модуль вектора скорости: где s — расстояние вдоль траектории движения (путь) |
|||||
|
Скорость средняя (модуль): |
|||||
|
Ускорение мгновенное: |
|||||
|
Модуль вектора ускорения при прямолинейном движении: |
|||||
|
Ускорение при криволинейном движении: 1) нормальное где R — радиус кривизны траектории, 2) тангенциальное 3) полное (вектор) 4) (модуль) |
|||||
|
Скорость и путь при движении: 1) равномерном 2) равнопеременном V0— начальная скорость; а > 0 при равноускоренном движении; а < 0 при равнозамедленном движении. |
|
||||
|
Угловая скорость: где φ — угловое перемещение. |
|||||
|
Угловое ускорение: |
|||||
|
Связь между линейными и угловыми величинами: |
|||||
|
Импульс материальной точки: где m — масса материальной точки. |
|||||
|
Основное уравнение динамики поступательного движения (II закон Ньютона): где F — результирующая сила, <> |
|||||
|
Формулы сил: тяжестиP где g — ускорение свободного падения трения Fтр где μ — коэффициент трения, N — сила нормального давления, упругости Fупр где k — коэффициент упругости (жесткости), Δх — деформация (изменение длины тела). |
|
||||
|
Закон сохранения импульса для замкнутой системы, состоящей из двух тел: где — скорости тел до взаимодействия; — скорости тел после взаимодействия. |
|||||
|
Потенциальная энергия тела: 1) поднятого над Землей на высоту h 2) упругодеформированного |
|
||||
|
Кинетическая энергия поступательного движения: |
|||||
|
Работа постоянной силы: где α — угол между направлением силы и направлением перемещения. |
|||||
|
Полная механическая энергия: |
|||||
|
Закон сохранения энергии: силы консервативны силы неконсервативны где W1 — энергия системы тел в начальном состоянии; W2 — энергия системы тел в конечном состоянии. |
|
||||
|
Момент инерции тел массой m относительно оси, проходящей через центр инерции (центр масс): 1) тонкостенного цилиндра (обруча) где R — радиус, 2) сплошного цилиндра (диска) 3) шара 4) стержня длиной l, если ось вращения перпендикулярна стержню и проходит через его середину |
|||||
|
Момент инерции тела относительно произвольной оси (теорема Штейнера): где — момент инерции тела относительно оси, проходящей через центр масс, d — расстояние между осями. |
|||||
|
Момент силы(модуль): где l — плечо силы. |
|||||
|
Основное уравнение динамики вращательного движения: где — угловое ускорение, — результирующий момент сил. |
|||||
|
Момент импульса: 1) материальной точки относительно неподвижной точки где r — плечо импульса, 2) твердого тела относительно неподвижной оси вращения |
|
||||
|
Закон сохранения момента импульса: где L1 — момент импульса системы в начальном состоянии, L2 — момент импульса системы в конечном состоянии. |
|||||
|
Кинетическая энергия вращательного движения: |
|||||
|
Работа при вращательном движении где Δφ — изменение угла поворота. |



Осн. формулы и метод. рекомендации по решению задач на кинематику МТ
Но для того, чтобы начать рассмотрение решений задач по данной теме, необходимо вспомнить основные формулы, связанные с этим разделом. Для удобства, сведём все формулы в таблицу.
Основные формулы равномерного прямолинейного движения
|
Формула |
Описание формулы |
|
Перемещение
тела за промежуток времени t, где –
скорость тела, sx, vx – проекции перемещения и скорость на ось Ох. |
|
|
Путь за промежуток времени t. |
|
|
Закон сложения скоростей в классической механике. |
|
|
Кинематическое уравнение равномерного движения, где х — координата тела в момент времени t, х0 — начальная координата тела. |

Основные формулы равноускоренного прямолинейного движения
|
Формула |
Описание формулы |
|
Скорость тела в момент времени t, где – ускорение тела, – скорость тела в начальный момент времени. |
|
|
Перемещение
тела за промежуток времени t. |
|
|
Кинематическое уравнение равноускоренного движения. |

Основные формулы движения тела по окружности с постоянной по модулю скоростью.
|
Формула |
Описание формулы |
|
Линейная скорость тела, где l — длина дуги окружности, пройденной телом за промежуток времени Δt. |
|
|
Угловая скорость тела, где Dj – угол поворота радиус-вектора движущегося по окружности тела за промежуток времени Dt. |
|
|
Связь
линейной скорости с угловой, где R — радиус
окружности. |
|
|
Период вращения, где N — число оборотов тела за промежуток времени Δt. |
|
|
Частота вращения. |
|
|
Связь между линейной скоростью, периодом вращения и частотой. |
|
|
Центростремительное ускорение. |
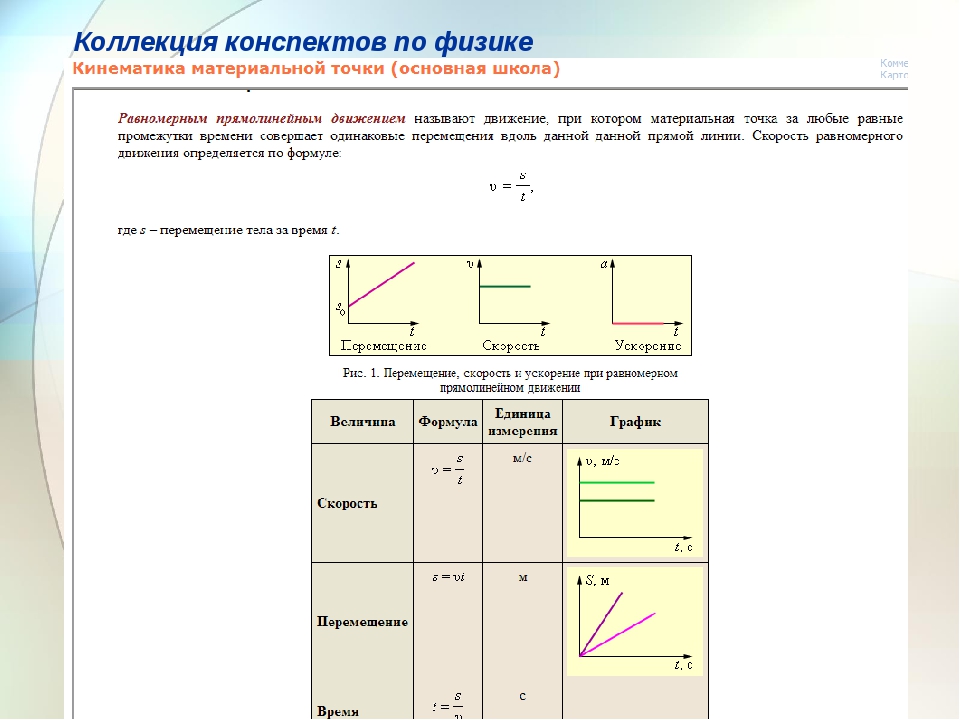
Известно, что для большей наглядности движение можно описывать с помощью графиков.
Давайте рассмотрим в сравнении графики для равномерного и равноускоренного движения.
Известно, что при равномерном движении скорость тела не
изменяется с течением времени. Поэтому графиком скорости, в этом случае, будет
прямая линия, параллельная оси времени. При равноускоренном движении тела,
неизменной величиной является ускорение. Поэтому графиком ускорения будет
являться также прямая линия, параллельная оси времени.
При равноускоренном движении тела,
неизменной величиной является ускорение. Поэтому графиком ускорения будет
являться также прямая линия, параллельная оси времени.
По графику скорости для равномерного движения, можно определить путь, пройденный телом за некоторый промежуток времени. Для этого достаточно определить площадь прямоугольника, образованного графиком скорости и осью времени.
Известно, что перемещение тела при равномерном движении линейно зависит от времени, поэтому графиком перемещения является прямая линия вида
y = kx.
Наклон же графика к оси времени зависит от модуля скорости. При равноускоренном движении линейно зависимой величиной является скорость тела. Поэтому графиком скорости является прямая линия вида
y = kx +b.
Используя график скорости для равноускоренного движения можно
определить перемещение тела за некоторый промежуток времени. Для этого
необходимо определить площадь прямоугольной трапеции или прямоугольного
треугольника, ограниченных графиком скорости и осью времени.
Для этого
необходимо определить площадь прямоугольной трапеции или прямоугольного
треугольника, ограниченных графиком скорости и осью времени.
График зависимости координаты от времени при равномерном движении, то есть график движения, представлен на рисунке ниже. По этому графику можно определить: координату тела в любой момент времени, путь, пройденный телом за некоторый промежуток времени, кратчайшее расстояние между телами в любой момент времени, а также момент и место встречи тел.
А графиком перемещения при равноускоренном движении является парабола, положение вершины которой зависит от направлений начальной скорости и ускорения. Так, если проекция ускорения отрицательна, то возможны следующие три вида графика перемещения:
– когда проекция начальной скороститела равна нулю;
– когда проекция начальной скорости тела меньше нуля;
– когда проекция начальной скорости тела больше нуля.
Если проекция ускорения положительна, то здесь также возможны три случая:
– когда начальная скорость тела равна нулю;
– когда проекция начальной скорости больше нуля;
– когда проекция начальной скорости меньше нуля.
Методические рекомендации по решению задач на кинематику материальной точки
1) Сделать схематический рисунок, который лучше всего представить в виде траектории движущейся точки с изображением векторов перемещения, скорости и ускорения.
2) Выбрать систему отсчета (то есть тело отсчета, связанную с
ним систему координат и начало отсчета времени) на основании тщательного
анализа условия задачи. Рациональный выбор системы отсчета, как правило,
значительно упрощает решение задачи. При выборе положительных направлений
координатных осей необходимо руководствоваться направлением движения (то есть
направлением вектора скорости) или направлением вектора ускорения.
3) Составить на основании законов движения систему уравнений в векторном виде для всех тел, участвующих в движении. А затем в скалярной форме, спроецировав на координатные оси эти векторные уравнения движения. При записи этих уравнений не забыть привести в соответствие знаки проекций скорости и ускорения с направлением координатных осей. При необходимости дополнить систему уравнений соотношениями, составленными на основе данных задачи и конкретной ситуации, описанной в ней.
4) Решить полученную систему уравнений относительно искомых величин в общем виде, убедиться в соответствии единиц измерения и проделать числовые расчеты.
Следование этим простым рекомендациям позволит вам успешнее справляться с решением задач на кинематику материальной точки.
основные формулы с пояснениями или определения по физике в 10 классе, какие законы динамики или механики для ЕГЭ
Описать можно все что угодно: картину в галерее, уличного хулигана в кабинете участкового и даже свои душевные переживания на приеме у психотерапевта. Достаточно вооружиться бумагой, ручкой и вперед.
Достаточно вооружиться бумагой, ручкой и вперед.
Но что необходимо, чтобы описать движение? На этот вопрос нам поможет ответить кинематика, раздел механики, который как раз и занимается описанием механического движения.
Физика простыми словами | Кинематика
Как описать движение?Давайте разберемся с терминологией и введем основные понятия, без которых нам никак не обойтись. Итак, движением мы будем называть любое изменение положения тела в пространстве с течением времени.
К слову сразу отметим, что время в физике принято мерить секундами, а само движущееся тело не всегда рассматривается целиком. Зачастую его размерами и формой можно пренебречь и рассматривать как точку, имеющую массу.
В механике вы можете услышать такие понятия как точечное тело или материальная точка. Так вот знайте, речь идет как раз об этом.
К примеру, какие бы габариты не имела ваша машина, если вы едете по трасе из Ростова в Москву, то она в любом случае очень мала в сравнении с расстоянием, а значит мы можем рассматривать её как материальную точку. А вот если, приехав в столицу нашей необъятной родины, вы ищете свободное место где припарковаться, то тут размерами и формой автомобиля пренебречь уже не получится.
А вот если, приехав в столицу нашей необъятной родины, вы ищете свободное место где припарковаться, то тут размерами и формой автомобиля пренебречь уже не получится.
Положение тела или материальной точки в пространстве рассматривается с помощью системы координат, за начало которой мы принимаем тело отсчета, относительно которого происходит движение. В зависимости от сложности этого движения мы можем иметь дело с одномерным, двухмерным, или трехмерным пространством.
Соответственно, наша система координат может иметь одну, две или три оси. Как правило трехмерные пространства в школьной физике практически не встречаются, поэтому мы ограничимся двухмерным с координатными осями х и у.
Чтобы определить координаты нашей материальной точки, необходимо построить её проекции на соответствующие координатные оси, опустив на них перпендикуляры.
Теперь если наблюдая за движущейся материальной точкой, построить линию, по которой она движется, мы получим траекторию движения. Измерив длину траектории можно определить пройденный путь, а если построить вектор, соединяющий начальное и конечное положение точки, это будет перемещение.
Измерив длину траектории можно определить пройденный путь, а если построить вектор, соединяющий начальное и конечное положение точки, это будет перемещение.
Так как единицей длинны в международной системе единиц был принят метр, то путь, пройденный телом, и длина вектора перемещения, или, как еще говорят, его модуль, так же будут измерятся в метрах. Отметим, что модуль перемещения всегда будет меньше, ну или в крайнем случае равен пути, но никак не больше.
Все просто, вектора кривыми не бывают, и перемещение не является исключением. А вот что касается траектории, то её мы можем гнуть как угодно.
Исходя из этого, можно выделить два вида механического движения: прямолинейное — когда траектория прямая линия и криволинейное — когда тело движется по кривой, ну, к примеру, параболе или окружности.
Прямолинейное движениеДавайте представим, что мы едем в автобусе, а для простоты будем считать, что траектория нашего движения — прямая линия. Если разделить весь путь (s), который мы проедем на затраченное время (t), мы получим скорость (v). То есть величину, которая характеризует быстроту движения. Измеряется она в метрах в секунду м/с.
Если разделить весь путь (s), который мы проедем на затраченное время (t), мы получим скорость (v). То есть величину, которая характеризует быстроту движения. Измеряется она в метрах в секунду м/с.
v=s/t
Так как движение относительно, то относительной будет и скорость. К примеру, если наш автобус едет со скоростью v1, ну скажем, равной 20 м/с, а мы, находясь в автобусе, идем в направлении водителя со скоростью v2, равной 1 м/с, то наша скорость относительно дороги будет определятся как сумма двух этих скоростей. То есть 21 м/с.
v=v1+v2
Ну а если мы будем идти от водителя, то наша скорость относительно дороги будет уже равна 19 м/с. И казалось бы, ничего не поменялось, и значения скоростей v1 и v2 остались прежними, но изменилось направление нашего движения, а значит, чтобы найти скорость, с которой мы движемся относительно дороги, нам нужно вычесть v2 из v1 .
v=v1-v2
В рассмотренных примерах мы условно принимали движение как равномерное, то есть движение с постоянной скоростью. Но в реальности, автобус то и дело будет останавливаться на светофорах и остановках, а потом опять разгоняться. Обгонять неторопливых автолюбителей.
Но в реальности, автобус то и дело будет останавливаться на светофорах и остановках, а потом опять разгоняться. Обгонять неторопливых автолюбителей.
Да и у нас не получится ходить по нему с постоянной скоростью, тем более если ехать в час пик, когда автобус забит под завязку. В реальности движение будет неравномерным, и скорость будет постоянно меняться.
При неравномерном движении отношение всего пройденного пути ко времени называется средней скоростью.
vср=s/t
И хотя в некоторых случаях она бывает очень удобна, но все же не всегда приемлема при описании движения. Думаю, будет очень трудно доказать сотруднику гос автоинспекции, остановившему вас за превышение скорости, что ваша средняя скорость на всем пути была в пределах нормы.
Тут речь пойдет о мгновенной скорости, или скорости в какой-то определенный момент времени. Если посмотреть на спидометр движущегося автомобиля, то мы как раз её увидим.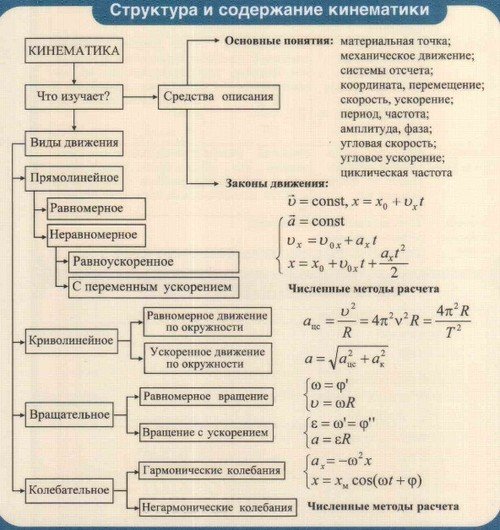
И стоит нам по сильнее нажать на педаль газа, как в то же мгновение стрелка спидометра начинает ползти вверх, оповещая нас об изменении скорости.
И здесь необходимо ввести понятие ускорения, величины, которая будет характеризовать изменение скорости движения за какой то промежуток времени (t). Её принято обозначать маленькой буквой a и измерять в м/с2.
а=(V-V0)/t
Ускорение, так же как и скорость, величина векторная, а значит будет иметь свое направление. Причем, если направление вектора ускорения будет совпадать с направлением скорости, то скорость будет возрастать.
Такое движение называют ускоренным. И напротив, снижение скорости, при замедленном движении, будет свидетельствовать о том что вектора ускорения и скорости смотрят в разные стороны. Выразим скорость и перемещение для движения с ускорением:
Если объединить эти уравнения в одно, мы получим формулу разности квадратов скоростей :
Итак, мы ввели основные понятия и величины кинематики и вывели основные уравнения, связывающие их. Но для простоты мы брали прямолинейное движение.
Но для простоты мы брали прямолинейное движение.
Если же говорить о движении по кривой, то нам придется уже рассматривать его в двухмерном или даже трехмерном пространстве.
Для этого необходимо будет построить проекции векторов скорости, перемещения и ускорения на соответствующие координатные оси, а при работе с проекциями мы опять получим уже знакомые уравнения для прямолинейного движения, которые примут следующий вид:
- Sx= V0x t +(axt2) /2
Sy= V0у t +(aуt2) /2
vx=v0x+axt
vy=v0y+ayt
Или для определения координат движущейся материальной точки:
- x= x 0 + V0x t +(axt2) /2
y= y 0 + V0у t +(aуt2) /2
Где х0, у0 — координаты начального положения точки в пространстве, а х, у — координаты её конечного положения.
Для описания движения в трехмерном пространстве у нас добавится третья ось z, и, соответственно, проекции скорости, ускорения и перемещения на эту ось.
Принцип разложения движения на простые составляющие лежит в основе многих устройств. Так первые компьютерные мыши были оснащены шариком, вращение которого приводило во вращение два перпендикулярно расположенных друг к другу колесика со специальными датчиками, они то и раскладывали сложные движения мыши на горизонтальные и вертикальные составляющие.
Стоило одному из этих колесиков покрыться толстым слоем грязи, как оно переставало вращаться, и указатель на экране начинал двигаться только по прямой, горизонтальной или вертикальной.
Современные оптические мыши лишены этого недостатка, так как в них шарик и колесики, заменены на лазерные датчики, но тем не менее принцип разложения движения они унаследовали от своих прародительниц.
Источник: https://physicsline.ru/teoriya/fizika-prostymi-slovami/fizika-prostymi-slovami-kinematika/
Основные формулы по физике: кинематика, динамика, статика
Итак, как говорится, от элементарного к сложному. Начнём с кинетических формул:
Также давайте вспомним движение по кругу:
Медленно, но уверенно мы перешли более сложной теме – к динамике:
Уже после динамики можно перейти к статике, то есть к условиям равновесия тел относительно оси вращения:
После статики можно рассмотреть и гидростатику:
Куда же без темы “Работа, энергия и мощность”. Именно по ней даются много интересных, но сложных задач. Поэтому без формул здесь не обойтись:
Именно по ней даются много интересных, но сложных задач. Поэтому без формул здесь не обойтись:
Основные формулы термодинамики и молекулярной физики
Последняя тема в механике – это “Колебания и волны”:
Теперь можно смело переходить к молекулярной физике:
Плавно переходим в категорию, которая изучает общие свойства макроскопических систем. Это термодинамика:
Основные формулы электричества
Для многих студентов тема про электричество сложнее, чем про термодинамика, но она не менее важна. Итак, начнём с электростатики:
- Переходим к постоянному электрическому току:
- Далее добавляем формулы по теме: “Магнитное поле электрического тока”
- Электромагнитная индукция тоже важная тема для знания и понимания физики. Конечно, формулы по этой теме необходимы:
- Ну и, конечно, куда же без электромагнитных колебаний:
Это были основные формулы физики
В статье мы подготовили 50 формул, которые понадобятся на экзамене в 99 случая из 100.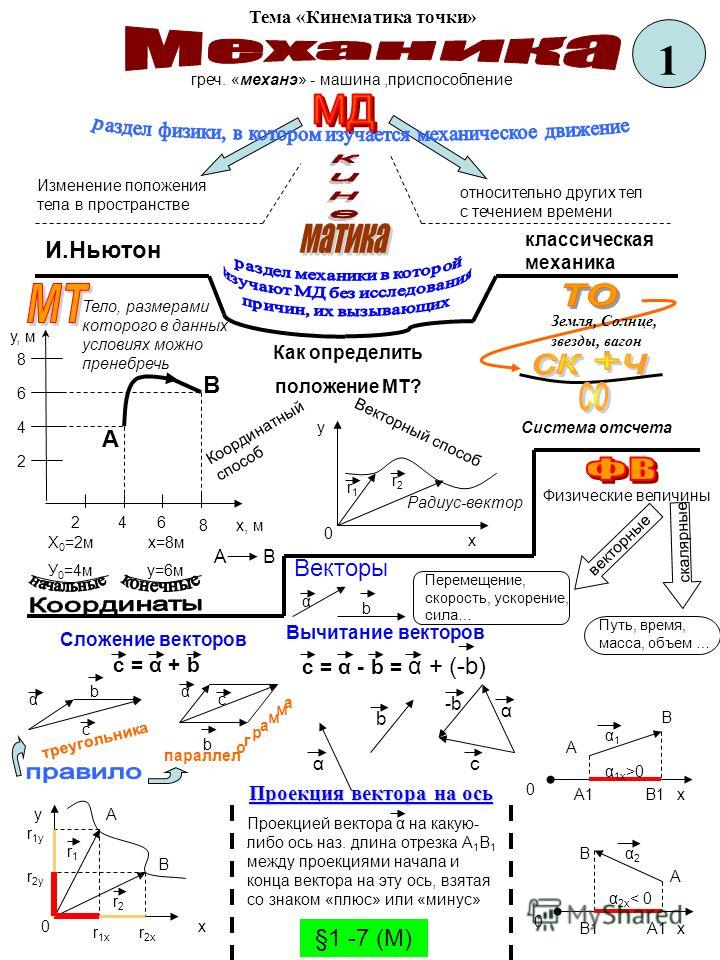
Совет: распечатайте все формулы и возьмите их с собой. Во время печати, вы так или иначе будете смотреть на формулы, запоминая их. К тому же, с основными формулами по физике в кармане, вы будете чувствовать себя на экзамене намного увереннее, чем без них.
Надеемся, что подборка формул вам понравилась!
Источник: https://NauchnieStati.ru/spravka/bolee-50-osnovnyh-formul-po-fizike/
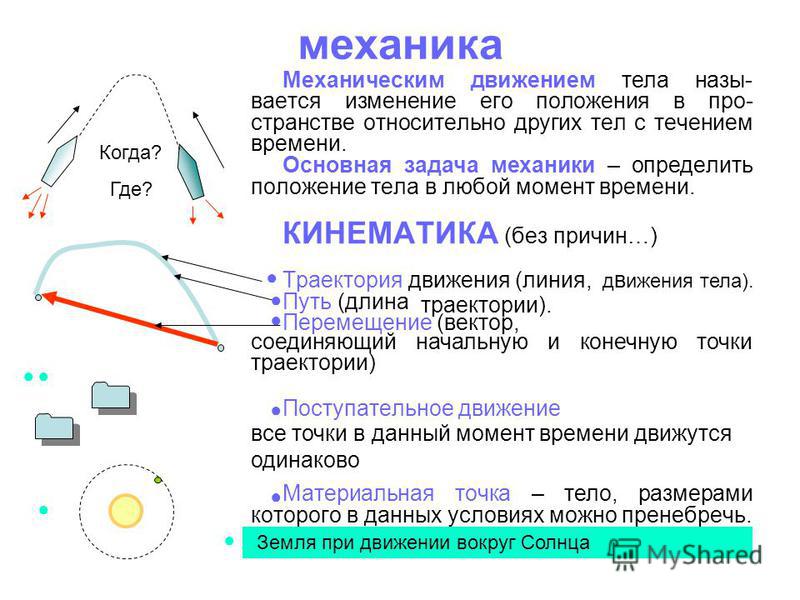
Механическое движение — определение, формулы, примеры
Механическое движение
Когда мы идем в школу или на работу, автобус подъезжает к остановке или сладкий корги гуляет с хозяином, мы имеем дело с механическим движением.
Механическим движением называется изменение положения тел в пространстве относительно других тел с течением времени.
«Относительно других тел» — очень важные слова в этом определении. Для описания движения нам нужны:
- тело отсчета
- система координат
- часы
В совокупности эти три параметра образуют систему отсчета.
В механике есть такой раздел — кинематика. Он отвечает на вопрос, как движется тело. Дальше мы с помощью кинематики опишем разные виды механического движения. Не переключайтесь 😉
Прямолинейное равномерное движение
Движение по прямой, при котором тело проходит равные участки пути за равные промежутки времени называют прямолинейным равномерным. Это любое движение с постоянной скоростью.
Например, если у вас ограничение скорости на дороге 60 км/ч, и у вас нет никаких препятствий на пути — скорее всего, вы будете двигаться прямолинейно равномерно.
Мы можем охарактеризовать это движение следующими величинами.
Скалярные величины (определяются только значением)
- Время — в международной системе единиц СИ измеряется в секундах [с].
- Путь — длина траектории (линии, по которой движется тело). В случае прямолинейного равномерного движения — длина отрезка [м].

Векторные величины (определяются значением и направлением)
- Скорость — характеризует быстроту перемещения и направление движения материальной точки [м/с].
- Путь — вектор, проведенный из начальной точки пути в конечную [м].
Проецирование векторов
Векторное описание движения полезно, так как на одном чертеже всегда можно изобразить много разнообразных векторов и получить перед глазами наглядную «картину» движения.
Однако всякий раз использовать линейку и транспортир, чтобы производить действия с векторами, очень трудоёмко. Поэтому эти действия сводят к действиям с положительными и отрицательными числами — проекциями векторов.
|
Если вектор сонаправлен с осью, то его проекция равна длине вектора. А если вектор противоположно направлен оси — проекция численно равна длине вектора, но отрицательна. Если вектор перпендикулярен — его проекция равна нулю. |

Скорость может определяться по вектору перемещения и пути, только это будут две разные характеристики.
Скорость — это векторная физическая величина, которая характеризует быстроту перемещения, а средняя путевая скорость — это отношение длины пути ко времени, за которое путь был пройден.
|
Скорость → → → |
|
Средняя путевая скорость V ср.путевая = S/t V ср.путевая — средняя путевая скорость [м/с] |
В чем разница между перемещением и путем?
Перемещение — это вектор, проведенный из начальной точки в конечную, а путь — это длина траектории.
Задача
Найдите, с какой средней путевой скоростью должен двигаться автомобиль, если расстояние от Санкт-Петербурга до Великого Новгорода в 210 километров ему нужно пройти за 2,5 часа. Ответ дайте в км/ч.
Решение:
Возьмем формулу средней путевой скорости
V ср.путевая = S/t
Подставим значения:
V ср.путевая = 210/2,5 = 84 км/ч
Ответ: автомобиль будет двигаться со средней путевой скоростью равной 84 км/ч
Уравнение движения
Основной задачей механики является определение положения тела в данный момент времени. Для решения этой задачи помогает уравнение движения, то есть зависимость координаты тела от времени х = х(t).
|
Уравнение движения x(t) = x0 + vxt x(t) — искомая координата [м] |
Если положительное направление оси ОХ противоположно направлению движения тела, то проекция скорости тела на ось ОХ отрицательна, скорость меньше нуля (v < 0), и тогда уравнение движения принимает вид:
|
Уравнение движения при движении против оси x(t) = x0 — vxt x(t) — искомая координата [м] |
Графики
Изменение любой величины можно описать графически. Вместо того, чтобы писать множество значений, можно просто начертить график — это проще.
Вместо того, чтобы писать множество значений, можно просто начертить график — это проще.
В видео ниже разбираемся, как строить графики кинематических величин и зачем они нужны.
Прямолинейное равноускоренное движение
Чтобы разобраться с тем, что за тип движения в этом заголовке, нужно ввести новое понятие — ускорение.
Ускорение — векторная физическая величина, характеризующая быстроту изменения скорости. В международной системе единиц СИ измеряется в метрах, деленных на секунду в квадрате.
СИ — международная система единиц. «Перевести в СИ» означает перевод всех величин в метры, килограммы, секунды и другие единицы измерения без приставок. Исключение — килограмм с приставкой «кило».
Итак, прямолинейное движение — это движение с ускорением по прямой линии.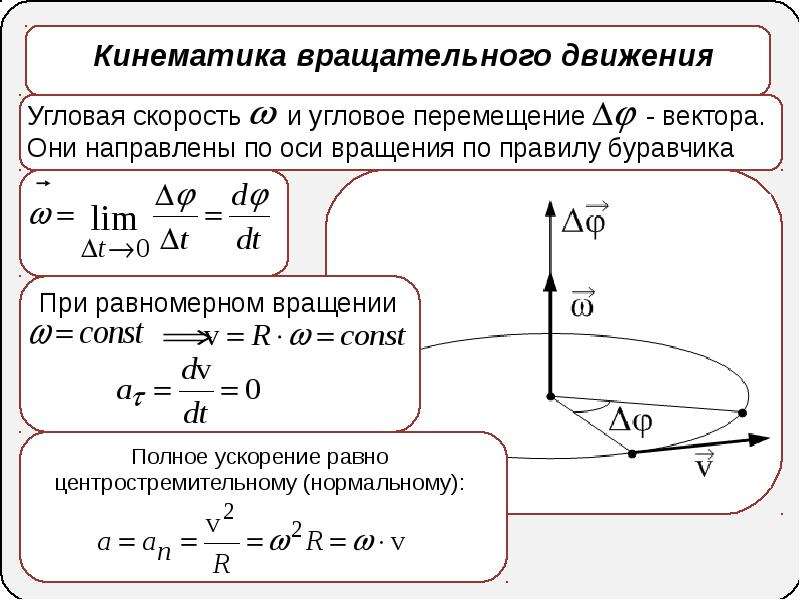 2, а в задачах мы и вовсе осмеливаемся округлять его до 10 (физики просто дерзкие).
2, а в задачах мы и вовсе осмеливаемся округлять его до 10 (физики просто дерзкие).
Вообще в значении ускорения свободного падения для Земли очень много знаков после запятой. В школе обычно дают значение: g = 9,8 м/с2. В экзаменах ОГЭ и ЕГЭ в справочных данных дают g = 10 м/с2.
И кому же верить?
Все просто: для кого решается задача, тот и главный. В экзаменах берем g = 10 , в школе при решении задач (если в условии задачи не написано что-то другое) берем g = 9,8 м/с2.
Частным случаем движения по вертикали (частным случаем частного случая, получается) считается свободное падение — это равноускоренное движение под действием силы тяжести, когда другие силы, действующие на тело, отсутствуют или пренебрежимо малы.
Помните о том, что свободное падение — это не всегда движение по вертикали. Если мы бросаем тело вверх, то начальная скорость, конечно же, будет.
Кинематика (скорость, ускорение, путь). Формулы, примеры решения
В прошлой статье мы немножко разобрались с тем, что такое механика и зачем она нужна. Мы уже знаем, что такое система отсчета, относительность движения и материальная точка. Что ж, пора двигаться дальше! Здесь мы рассмотрим основные понятия кинематики, соберем вместе самые полезные формулы по основам кинематики и приведем практический пример решения задачи.
Мы уже знаем, что такое система отсчета, относительность движения и материальная точка. Что ж, пора двигаться дальше! Здесь мы рассмотрим основные понятия кинематики, соберем вместе самые полезные формулы по основам кинематики и приведем практический пример решения задачи.
Присоединяйтесь к нам в телеграм и получайте ежедневную рассылку с полезной информацией по актуальным студенческим вопросам.
Траектория, радиус-вектор, закон движения тела
Кинематикой занимался еще Аристотель. Правда, тогда это не называлось кинематикой. Затем очень большой вклад в развитие механики, и кинематики в частности, внес Галилео Галилей, изучавший свободное падение и инерцию тел.
Итак, кинематика решает вопрос: как тело движется. Причины, по которым оно пришло в движение, ее не интересуют. Кинематике не важно, сама поехала машина, или ее толкнул гигантский динозавр. Абсолютно все равно.
Сейчас мы будем рассматривать самую простую кинематику – кинематику точки. Представим, что тело (материальная точка) движется. Не важно, что это за тело, все равно мы рассматриваем его, как материальную точку. Может быть, это НЛО в небе, а может быть, бумажный самолетик, который мы запустили из окна. А еще лучше, пусть это будет новая машина, на которой мы едем в путешествие. Перемещаясь из точки А в точку Б, наша точка описывает воображаемую линию, которая называется траекторией движения. Другое определение траектории – годограф радиус вектора, то есть линия, которую описывает конец радиус-вектора материальной точки при движении.
Не важно, что это за тело, все равно мы рассматриваем его, как материальную точку. Может быть, это НЛО в небе, а может быть, бумажный самолетик, который мы запустили из окна. А еще лучше, пусть это будет новая машина, на которой мы едем в путешествие. Перемещаясь из точки А в точку Б, наша точка описывает воображаемую линию, которая называется траекторией движения. Другое определение траектории – годограф радиус вектора, то есть линия, которую описывает конец радиус-вектора материальной точки при движении.
Радиус-вектор – вектор, задающий положение точки в пространстве.
Для того, чтобы узнать положение тела в пространстве в любой момент времени, нужно знать закон движения тела – зависимость координат (или радиус-вектора точки) от времени.
Перемещение и путь
Тело переместилось из точки А в точку Б. При этом перемещение тела – отрезок, соединяющий данные точки напрямую – векторная величина. Путь, пройденный телом – длина его траектории. Очевидно, перемещение и путь не стоит путать. Модуль вектора перемещения и длина пути совпадают лишь в случае прямолинейного движения.
Очевидно, перемещение и путь не стоит путать. Модуль вектора перемещения и длина пути совпадают лишь в случае прямолинейного движения.
В системе СИ перемещение и длина пути измеряются в метрах.
Перемещение равно разнице радиус-векторов в начальный и конечный моменты времени. Другими словами, это приращение радиус вектора.
Скорость и ускорение
Средняя скорость – векторная физическая величина, равная отношению вектора перемещения к промежутку времени, за которое оно произошло
А теперь представим, что промежуток времени уменьшается, уменьшается, и становится совсем коротким, стремится к нулю. В таком случае о средней скорости говорить на приходится, скорость становится мгновенной. Те, кто помнит основы математического анализа, тут же поймут, что в дальнейшем нам не обойтись без производной.
Мгновенная скорость – векторная физическая величина, равная производной от радиус вектора по времени. Мгновенная скорость всегда направлена по касательной к траектории.
В системе СИ скорость измеряется в метрах в секунду
Если тело движется не равномерно и прямолинейно, то у него есть не только скорость, но и ускорение.
Ускорение (или мгновенное ускорение) – векторная физическая величина, вторая производная от радиус-вектора по времени, и, соответственно, первая производная от мгновенной скорости
Ускорение показывает, как быстро изменяется скорость тела. В случае прямолинейного движения, направления векторов скорости и ускорения совпадают. В случае же криволинейного движения, вектор ускорения можно разложить на две составляющие: ускорение тангенциальное, и ускорение нормальное.
Тангенциальное ускорение показывает, как быстро изменяется скорость тела по модулю и направлено по касательной к траектории
Нормальное же ускорение характеризует быстроту изменения скорости по направлению. Векторы нормального и тангенциального ускорения взаимно перпендикулярны, а вектор нормального ускорения направлен к центру окружности, по которой движется точка. 2? Найти скорость, тангенциальное и полное ускорение точки для этого момента времени.
2? Найти скорость, тангенциальное и полное ускорение точки для этого момента времени.
Решение: мы знаем, что для того, чтобы найти скорость нужно взять первую производную по времени от закона движения, а нормальное ускорение равняется частному квадрата скорости и радиуса окружности, по которой точка движется. Вооружившись этими знаниями, найдем искомые величины.
Нужна помощь в решении задач? Профессиональный студенческий сервис готов оказать ее.
Кинематические уравнения
Целью этого первого раздела «Класса физики» было исследование разнообразных средств, с помощью которых может быть описано движение объектов. Разнообразие представлений, которые мы исследовали, включает словесные представления, графические представления, числовые представления и графические представления (графики положения-времени и графики скорости-времени). В Уроке 6 мы исследуем использование уравнений для описания и представления движения объектов. Эти уравнения известны как кинематические уравнения.
Эти уравнения известны как кинематические уравнения.
Есть множество величин, связанных с движением объектов — смещение (и расстояние), скорость (и скорость), ускорение и время. Знание каждой из этих величин дает описательную информацию о движении объекта. Например, если известно, что автомобиль движется с постоянной скоростью 22,0 м / с, на север в течение 12,0 секунд для смещения на север на 264 метра, то движение автомобиля полностью описано.И если известно, что вторая машина ускоряется из положения покоя с ускорением на восток 3,0 м / с 2 в течение 8,0 секунд, обеспечивая конечную скорость 24 м / с, восток и смещение на восток 96 метров. , то полностью описывается движение этой машины. Эти два утверждения дают полное описание движения объекта. Однако не всегда такая полнота известна. Часто бывает так, что известны лишь некоторые параметры движения объекта, а остальные неизвестны.Например, приближаясь к светофору, вы можете узнать, что ваша машина развивает скорость 22 м / с, восток и способна выдерживать заносное ускорение 8,0 м / с 2 , запад. Однако вы не знаете, какое смещение испытает ваша машина, если бы вы резко нажали на тормоз и занесло до полной остановки; и вы не знаете, сколько времени потребуется, чтобы остановиться. В таком случае неизвестные параметры могут быть определены с использованием физических принципов и математических уравнений (кинематических уравнений).
Однако вы не знаете, какое смещение испытает ваша машина, если бы вы резко нажали на тормоз и занесло до полной остановки; и вы не знаете, сколько времени потребуется, чтобы остановиться. В таком случае неизвестные параметры могут быть определены с использованием физических принципов и математических уравнений (кинематических уравнений).
БОЛЬШОЙ 4
Кинематические уравнения — это набор из четырех уравнений, которые можно использовать для прогнозирования неизвестной информации о движении объекта, если известна другая информация. Уравнения можно использовать для любого движения, которое можно описать как движение с постоянной скоростью (ускорение 0 м / с / с) или движение с постоянным ускорением. Их нельзя использовать в течение какого-либо периода времени, в течение которого изменяется ускорение.Каждое из кинематических уравнений включает четыре переменные. Если известны значения трех из четырех переменных, то можно вычислить значение четвертой переменной. Таким образом, кинематические уравнения предоставляют полезные средства прогнозирования информации о движении объекта, если известна другая информация. Например, если известно значение ускорения, а также начальное и конечное значения скорости буксирующего автомобиля, то смещение автомобиля и время можно предсказать с помощью кинематических уравнений.Урок 6 этого модуля будет посвящен использованию кинематических уравнений для прогнозирования числовых значений неизвестных величин для движения объекта.
Таким образом, кинематические уравнения предоставляют полезные средства прогнозирования информации о движении объекта, если известна другая информация. Например, если известно значение ускорения, а также начальное и конечное значения скорости буксирующего автомобиля, то смещение автомобиля и время можно предсказать с помощью кинематических уравнений.Урок 6 этого модуля будет посвящен использованию кинематических уравнений для прогнозирования числовых значений неизвестных величин для движения объекта.
Четыре кинематических уравнения, описывающие движение объекта:
В приведенных выше уравнениях используются различные символы. Каждый символ имеет свое особое значение. Символ d обозначает смещение объекта. Символ t обозначает время, в течение которого объект двигался.Символ a обозначает ускорение объекта. А символ v обозначает скорость объекта; индекс i после v (как в v i ) указывает, что значение скорости является начальным значением скорости, а индекс f (как в v f ) указывает, что значение скорости является конечным значением скорости.
Каждое из этих четырех уравнений надлежащим образом описывает математическую связь между параметрами движения объекта. Таким образом, они могут использоваться для прогнозирования неизвестной информации о движении объекта, если известна другая информация.В следующей части Урока 6 мы исследуем процесс этого.
Решение проблем базовой кинематики | Безграничная физика
Приложения
Есть четыре кинематических уравнения, которые описывают движение объектов без учета его причин.
Цели обучения
Выберите, какое уравнение кинематики использовать в задачах, в которых начальное начальное положение равно нулю
Основные выводы
Ключевые моменты
- Четыре кинематических уравнения включают пять кинематических переменных: [latex] \ text {d} [/ latex], [latex] \ text {v} [/ latex], [latex] \ text {v} _0 [/ latex] , [латекс] \ text {a} [/ latex] и [латекс] \ text {t} [/ latex].
- Каждое уравнение содержит только четыре из пяти переменных, а другая отсутствует.
- Важно выбрать уравнение, которое содержит три известные переменные и одну неизвестную переменную для каждой конкретной ситуации.
Ключевые термины
- кинематика : Раздел физики, связанный с движущимися объектами.
Кинематика — это раздел классической механики, который описывает движение точек, тел (объектов) и систем тел (групп объектов) без учета причин движения.2 + 2 \ text {ad} [/ latex]
Обратите внимание, что четыре кинематических уравнения включают пять кинематических переменных: [latex] \ text {d} [/ latex] , [latex] \ text {v} [/ latex] , [latex] \ text {v } _0 [/ latex] , [латекс] \ text {a} [/ latex] и [латекс] \ text {t} [/ latex]. Каждое из этих уравнений содержит только четыре из пяти переменных, а другая отсутствует. Это говорит нам, что нам нужны значения трех переменных, чтобы получить значение четвертой, и нам нужно выбрать уравнение, которое содержит три известные переменные и одну неизвестную переменную для каждой конкретной ситуации.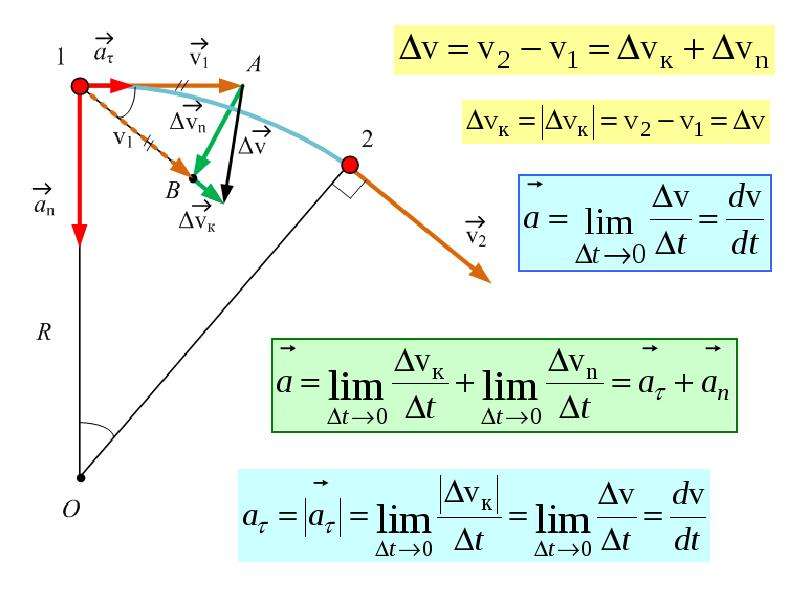
Вот основные этапы решения проблем с использованием этих уравнений:
Шаг первый — Определите, что именно необходимо определить в проблеме (определите неизвестные).
Шаг второй. Найдите уравнение или систему уравнений, которые помогут вам решить проблему.
Шаг третий — Подставьте известные значения вместе с их единицами измерения в соответствующее уравнение и получите численные решения вместе с единицами измерения.
Шаг четвертый. Проверьте ответ, чтобы узнать, разумен ли он: имеет ли он смысл?
Навыки решения проблем, безусловно, необходимы для успешного прохождения количественного курса физики.Что еще более важно, способность применять общие физические принципы, обычно представленные уравнениями, к конкретным ситуациям — очень мощная форма знания. Это намного эффективнее, чем запоминание списка фактов. Аналитические навыки и способность решать проблемы могут быть применены к новым ситуациям, тогда как список фактов не может быть достаточно длинным, чтобы содержать все возможные обстоятельства. Такие аналитические навыки полезны как для решения задач на уроках физики, так и для применения физики в повседневной и профессиональной жизни.
Такие аналитические навыки полезны как для решения задач на уроках физики, так и для применения физики в повседневной и профессиональной жизни.
Диаграммы движения
Диаграмма движения — это графическое описание движения объекта, которое представляет положение объекта через равные промежутки времени.
Цели обучения
Построить диаграмму движения
Основные выводы
Ключевые моменты
- Диаграммы движения представляют движение объекта, отображая его местоположение в разное время с равным интервалом на одной диаграмме.
- Диаграммы движения показывают начальное положение и скорость объекта, а также несколько точек в центре диаграммы.Эти пятна показывают состояние движения объекта.
- Диаграммы движения содержат информацию о положении объекта в определенные моменты времени и поэтому более информативны, чем диаграмма путей.
Ключевые термины
- стробоскопический : Относится к инструменту, который заставляет циклически движущийся объект казаться медленно движущимся или неподвижным.
- диаграмма : график или диаграмма.
- движение : изменение положения относительно времени.
Диаграмма движения — это графическое описание движения объекта. Он отображает местоположение объекта в разное время с равным интервалом на одной диаграмме; показывает начальное положение и скорость объекта; и представляет несколько точек в центре диаграммы. Эти пятна показывают, ускорился или замедлился объект. Для простоты объект представлен простой формой, например закрашенным кружком, который содержит информацию о положении объекта в определенные моменты времени.По этой причине диаграмма движения дает больше информации, чем диаграмма пути. Он также может отображать силы, действующие на объект в каждый момент времени.
— диаграмма движения по простой траектории. Представьте себе объект в виде хоккейной шайбы, скользящей по льду. Обратите внимание, что шайба преодолевает одинаковое расстояние за единицу пути по траектории.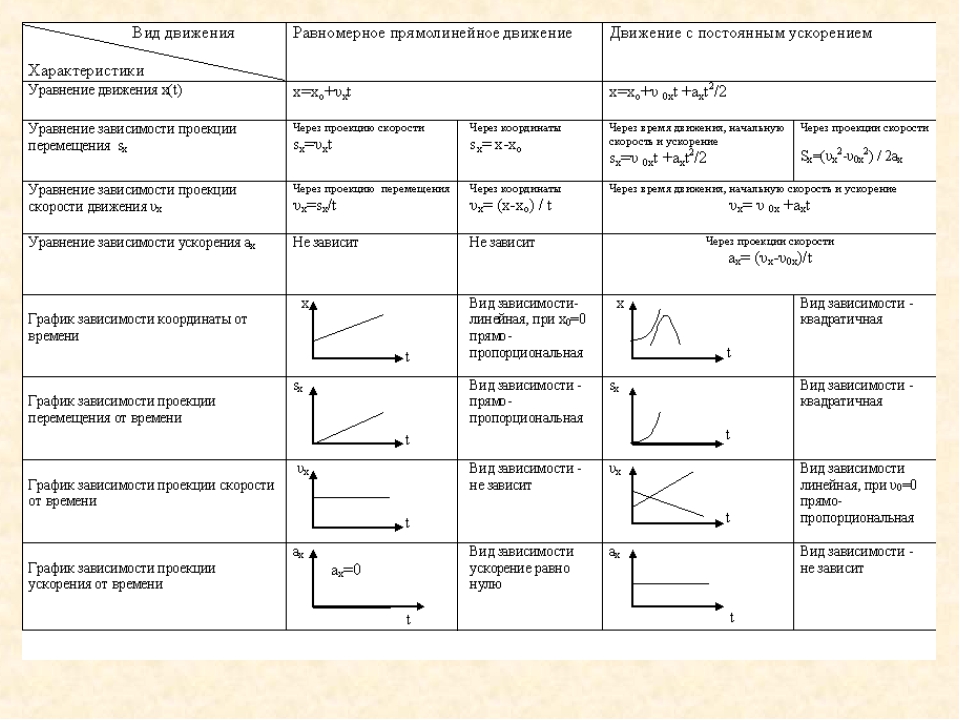 Можно сделать вывод, что шайба движется с постоянной скоростью и, следовательно, во время движения нет ускорения или замедления.
Можно сделать вывод, что шайба движется с постоянной скоростью и, следовательно, во время движения нет ускорения или замедления.
Шайба, скользящая по льду : Диаграмма движения шайбы, скользящей по льду.Шайба движется с постоянной скоростью.
Одно из основных применений диаграмм движения — это представление фильма через серию кадров, снятых камерой; это иногда называют стробоскопической техникой (как показано на рисунке). Просмотр объекта на диаграмме движения позволяет определить, ускоряется или замедляется объект или находится в постоянном покое. Когда кадры сделаны, мы можем предположить, что объект находится в постоянном покое, если он занимает одно и то же положение с течением времени. Мы можем предположить, что объект ускоряется, если есть видимое увеличение пространства между объектами с течением времени, и что он замедляется, если есть видимое уменьшение пространства между объектами с течением времени.Объекты на кадре очень близко подходят друг к другу.
прыгающий мяч : прыгающий мяч, снятый с помощью стробоскопической вспышки со скоростью 25 изображений в секунду.
Формула кинематических уравнений
Кинематика — это исследование движущихся объектов и их взаимосвязей. Есть четыре (4) кинематических уравнения, которые относятся к смещению D, скорости v, времени t и ускорению a.
a) D = v i t + 1/2 при 2 b) (v i + v f ) / 2 = D / t
c) a = (v f — v i ) / t d) v f 2 = v i 2 + 2aD
D = смещение
a = ускорение
т = время
v f = конечная скорость
v i = начальная скорость
Формула кинематических уравнений.
1) Боб едет на велосипеде в магазин со скоростью 4 м / с, когда перед ним выбегает кошка.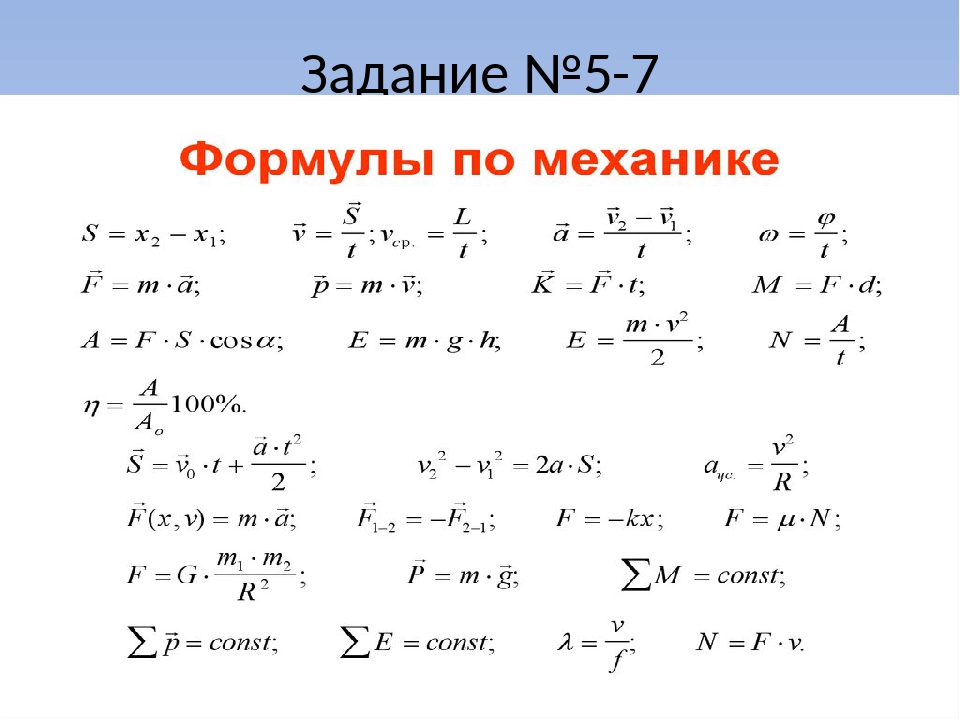 Он быстро тормозит до полной остановки, с ускорением — 2м / с 2 . Какое у него перемещение?
Он быстро тормозит до полной остановки, с ускорением — 2м / с 2 . Какое у него перемещение?
Ответ: Поскольку Боб остановлен, конечная скорость v f = 0. Его начальная скорость v i = 4 м / с. Ускорение, a = -2 м / с 2 . Время не указано, поэтому используйте уравнение (d) для смещения D, потому что оно не зависит от времени.
v f 2 = v i 2 + 2aD
(0) 2 = (4 м / с) 2 +2 (- 2 м / с 2 ) D
0 = 16 м 2 / с 2 + (- 4 м / с 2 ) D
-16 м 2 / с 2 = (- 4 м / с 2 ) D
16 м 2 / с 2 = 4 м / с 2 ) D
(16 м 2 / с 2 ) / (4 м / с 2 ) = D
Водоизмещение полное 4 м.
2) Вы путешествуете с постоянной скоростью 11 м / с в течение 5 минут. Как далеко вы уехали?
Как далеко вы уехали?
Ответ: При постоянной скорости v i = v f = 11 м / с. Время t = 5 мин или t = (60 сек / мин x 5 мин) = 300 сек. Теперь используйте уравнение (b), чтобы найти смещение D.
(v i + v f ) / 2 = D / t
D = [(v i + v f ) / 2] t
D = [(11 м / с + 11 м / с) / 2] x 300 с
D = (22 м / с) / 2 x 300 сек
D = 11 м / с x 300 с
D = 3300 м Водоизмещение полное 3,300 м.
3) Каково ускорение автомобиля, который разгоняется с 11 до 40 м / с за 10 секунд?
Ответ: V i = 11 м / с. V f = 40 м / с. Время, t = 10 с. Используйте кинематическое уравнение c), чтобы найти ускорение.
a = (v f — v i ) / t
a = (40 м / с — 11 м / с) / 10 с
a = (29 м / с) / 10 с = 2,9 м / с 2
4) Если автомобиль разгоняется на 3. 0 м / с 2 от полной остановки, сколько времени потребуется, чтобы проехать 3000 м?
0 м / с 2 от полной остановки, сколько времени потребуется, чтобы проехать 3000 м?
Ответ: Ускорение a = 2,9 м / с 2 и перемещение D = 3000 м. Автомобиль был неподвижен, поэтому v i = 0. Используйте уравнение a), чтобы найти время.
D = v i t + 1/2 при 2
3000 м = 0т + 1/2 (3,0 м / с 2 ) т 2
3000 м = 1/2 (3,0 м / с 2 ) / т 2
3000 м / 1.5 м / с 2 = t 2
2000 с 2 = t 2
t = 44,72 сек
Краткое знакомство с кинематическими физическими уравнениями
В этом блоге мы собираемся подробно рассказать о кинематических уравнениях физики, важном предмете физики. Это предмет, по которому учащимся очень трудно читать, потому что он использует множество формул и уравнений. Поэтому в этом блоге мы очень хорошо расскажем студентам уравнения кинематической физики, чтобы они могли легко их прочитать.
Механика состоит из трех частей: кинематики, динамики и статики. Но в этом блоге мы остановимся только на кинематике. Кинематика — это раздел механики, в котором, если что-то движется, вам нужно знать, как это движется.
Обзор кинематики
Кинематика — это раздел механики, в котором вы хотите знать только то, как движется движение, и не хотите знать, почему оно движется. В кинематике учащиеся просто описывают движение и не хотят знать, почему и кто движет это движение.
В кинематике мы только хотим знать, движется ли объект, где он движется, в каком направлении он движется, каков путь этого объекта и сколько времени занимает этот объект. Это означает, что в кинематике мы только описываем объект и не знаем, почему объект движется.
Как вы все знаете, при описании движения в кинематике есть четыре параметра нисходящего движения: смещение, скорость, ускорение и время, так что вы можете хорошо описать движение.
Параметры кинематических уравнений физики
Расстояние и перемещение
Расстояние и Смещение — это параметры кинематики, по которым мы можем понять движение. Смещение означает изменение положения любого данного объекта. Смещение сообщает нам, насколько движется данный объект и насколько он движется в заданном направлении.
Смещение означает изменение положения любого данного объекта. Смещение сообщает нам, насколько движется данный объект и насколько он движется в заданном направлении.
Есть разница между смещением и расстоянием. В отношении расстояния мы должны указать фактическое расстояние фактического путешествия, которое мы совершили, а в отношении смещения мы должны указать, что выбираем кратчайший маршрут, чтобы добраться из одного места в другое. Студенты часто не понимают значения этих двух слов, поэтому мы объяснили разницу между расстоянием и смещением.
И расстояние, и смещение являются параметрами кинематики и помогают нам описать движение данного объекта.
Формула для смещения приведена ниже:
смещение = конечное положение — начальное положение = изменение положения
S = Xf-Xi = изменение в X
Xf = конечное положение
Xi = исходное положение
S = смещение
формула для расстояния приведена ниже:
d = сумма фактического расстояния
Скорость
Kinematics имеет еще один параметр, с помощью которого мы можем описать движение, называемое скоростью. Скорость помогает описать движение. Скорость означает, насколько быстро объект перемещается из одной точки в другую в заданном направлении.
Скорость помогает описать движение. Скорость означает, насколько быстро объект перемещается из одной точки в другую в заданном направлении.
С помощью Velocity мы можем узнать скорость движения объекта. Это также главный параметр уравнений кинематической физики. Скорость сообщает нам, сколько времени требуется объекту, чтобы переместиться из одного места в другое, чтобы мы могли оценить его скорость.
Скорость основана на скорости, и это дает нам правильное среднее значение. С помощью скорости мы можем узнать скорость объекта, перемещающегося из одного места в другое, и исходя из этого мы находим ее среднее значение, которое называется средней скоростью.
Формула для скорости приведена ниже:
v = Δs / Δt
Разгон
Ускорение — это параметр уравнений физики кинематики, с его помощью также можно описать скорость. Ускорение означает, насколько скорость меняется каждый момент. Это дает нам представление о том, насколько ускоряется данный объект от одной точки до другой.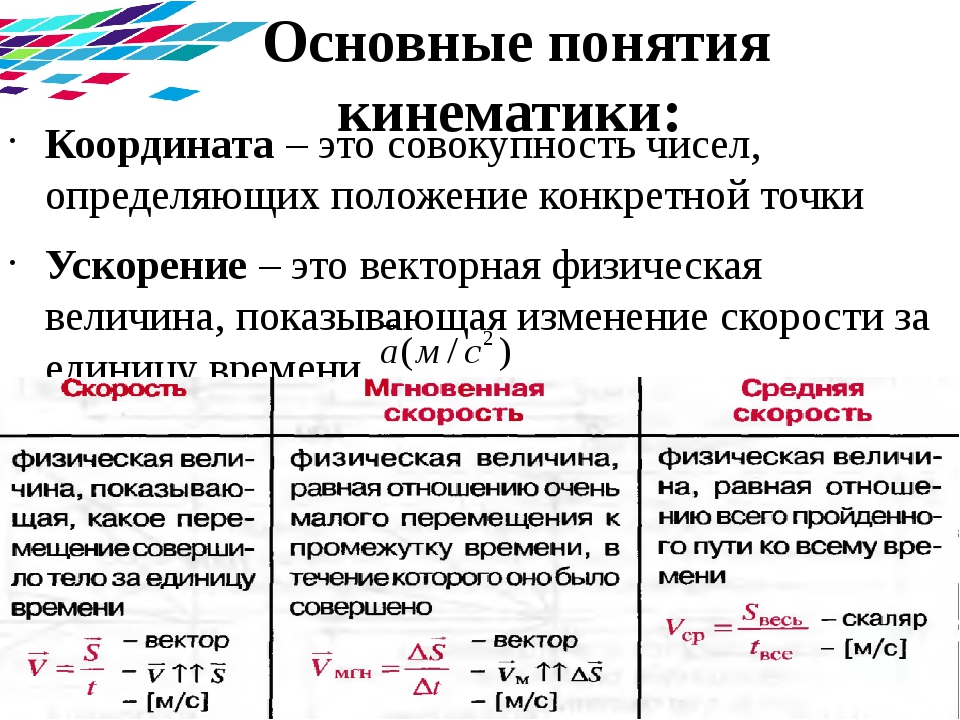
Существует обратная зависимость между ускорением и временем: если время увеличивается, то ускорение уменьшается, а если время уменьшается, то ускорение увеличивается.
Формула ускорения приведена ниже:
a = Δv / Δt
Время
Значение времени во всем, точно так же время играет огромную роль в уравнениях кинематической физики. Время — его параметр для описания движения, время — единственная точка отсчета для всех вышеперечисленных параметров.
Время используется почти со всеми параметрами. Без времени мы не можем описать эти три параметра. Следовательно, время играет очень важную роль в операциях кинематической физики.
Кинематика Физические уравнения
Прежде всего, необходимо вычислить наклон диагональной линии. Здесь наклон представляет собой изменение скорости, деленное на изменение во времени. Кроме того, наклон равен ускорению.
a = v2 – v1 / t2 – t1
Необходимо записать t2 — t1 как Δt
а = v2 − v1 / Δt. Это, безусловно, уравнение 1. Его нужно переставить так, чтобы v2 оказался слева. Это, безусловно, выразило бы формулу в форме линии с пересечением наклона.
Это, безусловно, уравнение 1. Его нужно переставить так, чтобы v2 оказался слева. Это, безусловно, выразило бы формулу в форме линии с пересечением наклона.
v2 = v1 + aΔt
Чтобы получить следующую формулу, нужно сначала вывести выражение для смещения объекта. Кроме того, временной интервал Δt. Расчет смещения ниже:
S = vΔt
Кроме того, смещение объекта заведомо равно v1Δt. Кроме того, произведение v1 равно площади A1.
Итак, A1 = v1Δt
Тогда A2 = (V2 − V1Δt) / 2
Теперь добавляем A1 и A2
с = A1 + A2
Замена на A1 и A2 дает
с = (v2 − v1) / 2Δt + v1Δt
Теперь упрощение даст
с = (v2 + v1) / 2Δt.Это уравнение 2.
Уравнение № 3 найдено путем исключения v2
Надо начинать с формулы 1
v2 = v1 + aΔt
Теперь нужно применить алгебру, чтобы левая часть формулы выглядела как правая часть формулы 2
v2 + v1 = v1 + aΔt + v1
v2 + v1 = 2v1 + aΔt
Кроме того, надо обе стороны умножить на 12Δt
с = (v2 + v1) / 2Δt = (2v1 + aΔt) / 2Δt
с = v1Δt + aΔtsq / 2. Это формула 3
Это формула 3
Формула 4 находится путем исключения временной переменной, или Δt
Теперь, безусловно, следует начать с уравнения 1, перестановка которого произошла с ускорением в левой части знака равенства
а = v2 − v1 / Δt
Кроме того, нужно умножить левую часть уравнения 1 на левую часть уравнения 2.Более того, нужно умножить правую часть уравнения 1 на правую часть уравнения 2.
с = (v2 + v1) / 2Δt
как = [(v2 – v1) / 2Δt] [v2-v1 / Δt]
Тогда Δt сокращается, что, безусловно, приводит к упрощению уравнения.
2as = v2sq − v1sq
Эта формула почти всегда записывается как:
v2sq = v1sq + 2as. Это формула 4.
Быстрые ссылки
ЗАКЛЮЧЕНИЕ
В этом блоге мы объяснили физику в кинематике.Студенты часто путаются с уравнениями кинематической физики, потому что в них используется множество формул и уравнений, поэтому мы определили основные формулы и уравнения кинематики в этом блоге.
Мы надеемся, что вы все узнали об уравнениях кинематической физики. Если по-прежнему возникают какие-либо сомнения, связанные с уравнениями кинематики и физики, вы свяжетесь с нашими экспертами, вы также получите онлайн-справку по домашнему заданию по физике или помощь в назначении физики от экспертов из наших консультантов, вы можете получить помощь.
Уравнения кинематики и постоянное ускорение
В своих «Диалогах двух новых наук» Галилей вывел взаимосвязь между пройденным расстоянием и временем, когда шары катились по наклонной плоскости.Это часто называют законом падающих тел. Интересно, что в доказательстве Галилея использовалась классическая евклидова геометрия (которая была бы незнакома современному изучающему геометрию из учебников) вместо алгебры, которую мы здесь и представим. Учащиеся продвинутого уровня могут выводить те же уравнения с помощью математического анализа.
Основа Закона падающих тел заключается в том, что по мере того, как мяч катится по рампе, он ускоряется. По мере увеличения его скорости увеличивается расстояние, которое он проходит за каждую единицу времени.Галилей определил это с помощью колокольчиков спускового крючка катящегося шарика.
По мере увеличения его скорости увеличивается расстояние, которое он проходит за каждую единицу времени.Галилей определил это с помощью колокольчиков спускового крючка катящегося шарика.
Процитируем Галилея в переводе:
По сути, Галилей представил, что не только ускорение вниз по рампе из-за постоянной силы тяжести, но и что скорость увеличивается линейно с временем . Он представил, что положение увеличивается с квадратом времени, что часто называют Законом падающих тел. Последний пункт в этом отрывке, который он представил, заключается в том, что скорость увеличивается с квадратом расстояния вниз по рампе.
Основываясь на том, что вы уже узнали и что представил Галилей, у нас есть то, что мой учитель физики Гленн Глейзер любил называть пятью священными уравнениями кинематики для постоянного ускорения. В этих уравнениях v — скорость, x — положение, t — время и a — ускорение. Помните, что Δ означает изменение.
1. или Δx = v ср. Δt
2. или v f = v o + aΔt или Δv = aΔt
3.
4. Δx = v o Δt + ½ a Δt 2
5. v f 2 = v o 2 + 2aΔx
Первые два уравнения, которые мы видели раньше. Важно отметить, что в первом уравнении используется средняя скорость , тогда как во втором уравнении используется изменение между исходной и конечной скоростью . Связь между ними представлена в третьем уравнении, которое представляет собой просто закон средних чисел.Средняя скорость — это среднее значение исходной и конечной скорости.
Из этих трех основных определений мы можем вывести следующие два уравнения, используя либо геометрию, либо алгебру (или исчисление).
Используя алгебру, мы можем вывести уравнение №4.
Исходя из уравнения № 1
Δx = v ср. Δt
Затем мы подставляем определение средней скорости из уравнения №3.
Отсюда мы подставляем окончательную скорость, полученную в уравнении № 2
Затем мы распределяем член Δt и упрощаем, комбинируя члены v o .
Мы упрощаем оставшиеся два члена, чтобы получить
Стоит отметить, что происходит, когда исходная скорость v o, равна нулю. Это уравнение еще больше упрощается и становится
.
Если мы предположим, что исходная позиция и время равны нулю, мы можем дополнительно уменьшить это до
Используя геометрию, мы можем исследовать область под кривой графика зависимости скорости от времени для движения с постоянным ускорением.
Если мы посмотрим на область под кривой, мы можем разбить ее на прямоугольник и треугольник. Красный прямоугольник — это вклад исходной скорости объекта. Смещение из-за ускорения представлено зеленым треугольником. Треугольник имеет ширину Δt и высоту aΔt, которые мы знаем из уравнения №2. Член ½ происходит от формулы площади треугольника.
Мы также можем использовать исчисление для вывода этого уравнения путем интегрирования удвоенного ускорения по времени.
Пятое священное уравнение может быть получено аналогичными заменами, и его оставят как домашнее задание.
Теперь давайте рассмотрим несколько примеров задач: Численное решение задач.
Пример 1
По легенде, Галилей уронил мяч из Пизанской башни. Если высота башни составляет 55,9 м и пренебрегая сопротивлением воздуха, сколько времени потребуется свинцовому мячу, чтобы достичь земли?
Гивенс: a = g ≈ 10 м / с 2
Δx = 55.9 м
Неизвестно: t = ???
Уравнение, связывающее эти переменные, — это священное уравнение 4 th .
Δx = v o Δt + ½ a Δt 2
Как упоминалось ранее, поскольку начальная скорость равна нулю, уравнение упрощается.
Δx = v o Δt + ½ a Δt 2 = ½ a Δt 2
Поскольку мы хотим изолировать переменную для времени, мы пересекаем умножение, чтобы переместить ½ и член ускорения на другую сторону.
Затем извлекаем квадратный корень из обеих частей.
Это дает выражение для времени. Обратите внимание, что я вставил несколько дополнительных скобок, которые могут вам не понадобиться.
При подключении номеров это довольно просто то, что мы называем «подключи и забей». Однако с агрегатами нужно быть осторожным. Вы, наверное, догадались, что время будет измеряться в секундах. Однако у вас должна быть возможность отменить фактические единицы, чтобы получить время в секундах.
Пример 2
Койот падает со скалы высотой 25 метров. Как быстро койот падает, когда ударяется о землю? Если проблема койота
Дано x = 25 м
a = g ≈ 10 м / с 2
Неизвестно: v = ???
Эту проблему можно решить несколькими способами. Можно использовать комбинацию или Священные уравнения №2 и №4. Или вы можете напрямую использовать уравнение № 5.
Использование v f 2 = v o 2 + 2aΔx
Это упрощается, поскольку исходная скорость v o, равна нулю.
Если извлечь квадратный корень из обеих частей уравнения
Обратите внимание, как вы извлекаете квадратный корень из единиц, чтобы получить м / с .
Мы оставим решение этой задачи с двумя уравнениями для домашней задачи.
Краткое изложение проблем построения графиков, наклона и площади под кривыми
Изучая графики положения, скорости и ускорения, вы сможете рисовать их как взаимозаменяемые.
Вчера в классе вы видели, что график объекта, ускоряющегося вниз по склону, выглядит следующим образом:
В этом примере мы используем программное обеспечение для анализа изображений.Это пример с мячом, катящимся с холма. Следует отметить, что график ускорения не показывает фактическую скорость, а показывает только то, как она меняется. Точно так же график скорости не дает вам фактического положения объекта, а только того, как он изменяется. Щелкнув по мячу и нажав кнопку трека, вы увидите график положения и скорости.
Здесь вы можете увидеть результаты построения графика движения. График положения представляет собой параболу, а график скорости — линейный.
3.4 Движение с постоянным ускорением — Университетская физика, Том 1
Цели обучения
К концу этого раздела вы сможете:
- Определите, какие уравнения движения следует использовать для решения неизвестных.
- Используйте соответствующие уравнения движения, чтобы решить задачу о преследовании двух тел.
Можно предположить, что чем больше ускорение, скажем, у автомобиля, удаляющегося от знака «Стоп», тем больше смещение автомобиля за данный момент времени.Но мы не разработали конкретное уравнение, которое связывает ускорение и смещение. В этом разделе мы рассмотрим некоторые удобные уравнения кинематических отношений, начиная с определений смещения, скорости и ускорения. Сначала мы исследуем движение одного объекта, называемого движением одного тела. Затем мы исследуем движение двух объектов, называемое задачами преследования двух тел.
Обозначение
Во-первых, сделаем несколько упрощений в обозначениях. Принятие начального времени равным нулю, как если бы время измерялось секундомером, является большим упрощением.Поскольку прошедшее время равно Δt = tf − t0Δt = tf − t0, принятие t0 = 0t0 = 0 означает, что Δt = tfΔt = tf, последнее время на секундомере. Когда начальное время принимается равным нулю, мы используем индекс 0 для обозначения начальных значений положения и скорости. То есть x0x0 — это начальная позиция , а v0v0 — начальная скорость . Мы не ставим индексы на окончательные значения. То есть t — это конечный момент времени , x — конечная позиция , а v — конечная скорость . Это дает более простое выражение для затраченного времени: Δt = tΔt = t.Это также упрощает выражение для смещения x , которое теперь равно Δx = x − x0Δx = x − x0. Кроме того, это упрощает выражение для изменения скорости, которое теперь равно Δv = v − v0Δv = v − v0. Подводя итог, используя упрощенные обозначения, с начальным временем, принятым равным нулю,
Δt = tΔx = x − x0Δv = v − v0, Δt = tΔx = x − x0Δv = v − v0,, где нижний индекс 0 обозначает начальное значение, а отсутствие нижнего индекса означает конечное значение в любом рассматриваемом движении.
Теперь мы делаем важное предположение, что ускорение постоянно .Это предположение позволяет нам избегать использования расчетов для определения мгновенного ускорения. Поскольку ускорение постоянно, среднее и мгновенное ускорения равны, то есть
a– = a = постоянная. a– = a = постоянная.Таким образом, мы можем использовать символ a для ускорения в любое время. Предположение, что ускорение является постоянным, не серьезно ограничивает ситуации, которые мы можем изучить, и не ухудшает точность нашего лечения. Во-первых, ускорение равно постоянному в большом количестве ситуаций.Кроме того, во многих других ситуациях мы можем точно описать движение, приняв постоянное ускорение, равное среднему ускорению для этого движения. Наконец, для движения, во время которого ускорение резко меняется, например, когда автомобиль разгоняется до максимальной скорости, а затем тормозит до остановки, движение можно рассматривать в отдельных частях, каждая из которых имеет собственное постоянное ускорение.
Смещение и положение от скорости
Чтобы получить наши первые два уравнения, мы начнем с определения средней скорости:
Подставляя упрощенные обозначения для ΔxΔx и ΔtΔt, получаем
v– = x − x0t.v– = x − x0t.Решение относительно x дает нам
x = x0 + v – t, x = x0 + v – t,3,10
, где средняя скорость
v– = v0 + v2.v– = v0 + v2.3,11
Уравнение v– = v0 + v2v– = v0 + v2 отражает тот факт, что при постоянном ускорении v – v– представляет собой просто среднее значение начальной и конечной скоростей. Рисунок 3.18 графически иллюстрирует эту концепцию. В части (а) рисунка ускорение является постоянным, а скорость увеличивается с постоянной скоростью. Средняя скорость в течение 1-часового интервала от 40 км / ч до 80 км / ч составляет 60 км / ч:
v– = v0 + v2 = 40 км / ч + 80 км / ч3 = 60 км / ч.v– = v0 + v2 = 40 км / ч + 80 км / ч3 = 60 км / ч.В части (b) ускорение не является постоянным. В течение 1-часового интервала скорость ближе к 80 км / ч, чем к 40 км / ч. Таким образом, средняя скорость больше, чем в части (а).
Рисунок 3.18 (a) График зависимости скорости от времени с постоянным ускорением, показывающий начальную и конечную скорости v0andvv0andv. Средняя скорость равна 12 (v0 + v) = 60 км / ч22 (v0 + v) = 60 км / ч. (б) График зависимости скорости от времени с изменением ускорения со временем. Средняя скорость не равна 12 (v0 + v) 12 (v0 + v), но превышает 60 км / ч.Решение для окончательной скорости по ускорению и времени
Мы можем вывести еще одно полезное уравнение, манипулируя определением ускорения:
Подстановка упрощенных обозначений для ΔvΔv и ΔtΔt дает
а = v − v0t (константа). a = v − v0t (константа).Решение для v дает
v = v0 + at (constanta). v = v0 + at (constanta).3,12
Пример 3,7
Расчет конечной скорости
Самолет приземляется с начальной скоростью 70.0 м / с, а затем ускоряется против движения со скоростью 1,50 м / с 2 за 40,0 с. Какова его конечная скорость?Стратегия
Сначала мы идентифицируем известные: v0 = 70 м / с, a = -1,50 м / с2, t = 40sv0 = 70 м / с, a = -1,50 м / с2, t = 40 с.Во-вторых, мы идентифицируем неизвестное; в данном случае это конечная скорость vfvf.
Наконец, мы определяем, какое уравнение использовать. Для этого мы выясняем, какое кинематическое уравнение дает неизвестное в терминах известных. Мы рассчитываем окончательную скорость, используя уравнение 3.12, v = v0 + atv = v0 + at.
Решение
Подставьте известные значения и решите: v = v0 + при = 70,0 м / с + (- 1,50 м / с2) (40,0 с) = 10,0 м / с v = v0 + при = 70,0 м / с + (- 1,50 м / с2) (40,0 с) = 10,0 м / с.Рисунок 3.19 представляет собой эскиз, показывающий векторы ускорения и скорости.
Рис. 3.19. Самолет приземляется с начальной скоростью 70,0 м / с и замедляется до конечной скорости 10,0 м / с, прежде чем направиться к терминалу. Обратите внимание, что ускорение отрицательное, потому что его направление противоположно его скорости, которая положительна.
Значение
Конечная скорость намного меньше начальной скорости, требуемой при замедлении, но все же положительная (см. Рисунок). С реактивными двигателями обратная тяга может поддерживаться достаточно долго, чтобы остановить самолет и начать движение назад, на что указывает отрицательная конечная скорость, но в данном случае это не так.Помимо полезности при решении задач, уравнение v = v0 + atv = v0 + at дает нам представление о взаимосвязях между скоростью, ускорением и временем.Мы видим, например, что
- Конечная скорость зависит от того, насколько велико ускорение и как долго оно длится
- Если ускорение равно нулю, то конечная скорость равна начальной скорости ( v = v 0 ), как и ожидалось (другими словами, скорость постоянна)
- Если a отрицательное, то конечная скорость меньше начальной скорости
Все эти наблюдения соответствуют нашей интуиции. Обратите внимание, что всегда полезно исследовать основные уравнения в свете нашей интуиции и опыта, чтобы убедиться, что они действительно точно описывают природу.
Решение для конечного положения с постоянным ускорением
Мы можем объединить предыдущие уравнения, чтобы найти третье уравнение, которое позволяет нам вычислить окончательное положение объекта, испытывающего постоянное ускорение. Начнем с
Добавление v0v0 к каждой стороне этого уравнения и деление на 2 дает
v0 + v2 = v0 + 12at. v0 + v2 = v0 + 12at.Так как v0 + v2 = v – v0 + v2 = v– для постоянного ускорения, имеем
v– = v0 + 12at.v– = v0 + 12at.Теперь мы подставляем это выражение для v – v– в уравнение для смещения, x = x0 + v – tx = x0 + v – t, что дает
х = х0 + v0t + 12at2 (константа).х = х0 + v0t + 12at2 (константа).3,13
Пример 3.8
Расчет смещения ускоряющегося объекта
Драгстеры могут развивать среднее ускорение 26,0 м / с 2 . Предположим, драгстер ускоряется из состояния покоя с этой скоростью в течение 5,56 с. Рис. 3.20. Как далеко он пролетит за это время?Рис. 3.20. Пилот Top Fuel в армии США Тони «Сержант» Шумахер начинает гонку с контролируемого выгорания. (Источник: подполковник Уильям Термонд. Фото любезно предоставлено США.Армия.)
Стратегия
Сначала нарисуем набросок Рис. 3.21. Нас просят найти смещение, которое составляет x , если мы примем x0x0 равным нулю. (Думайте о x0x0 как о стартовой линии гонки. Она может быть где угодно, но мы называем ее нулевой и измеряем все остальные позиции относительно нее.) Мы можем использовать уравнение x = x0 + v0t + 12at2x = x0 + v0t + 12at2 когда мы идентифицируем v0v0, aa и t из постановки задачи.Рис. 3.21. Эскиз разгоняющегося драгстера.
Решение
Во-первых, нам нужно определить известные.Запуск из состояния покоя означает, что v0 = 0v0 = 0, a задается как 26,0 м / с 2 и t задается как 5,56 с.Во-вторых, мы подставляем известные значения в уравнение, чтобы найти неизвестное:
x = x0 + v0t + 12at2.x = x0 + v0t + 12at2.Поскольку начальное положение и скорость равны нулю, это уравнение упрощается до
Подстановка идентифицированных значений на и t дает
x = 12 (26,0 м / с2) (5,56 с) 2 = 402 м. x = 12 (26,0 м / с2) (5,56 с) 2 = 402 м.Значение
Если мы переведем 402 м в мили, мы обнаружим, что пройденное расстояние очень близко к четверти мили, стандартному расстоянию для дрэг-рейсинга. Итак, наш ответ разумный. Это впечатляющий водоизмещение всего за 5,56 с, но первоклассные драгстеры могут преодолеть четверть мили даже за меньшее время. Если бы драгстеру была присвоена начальная скорость, это добавило бы еще один член в уравнение расстояния. Если в уравнении использовать те же ускорение и время, пройденное расстояние будет намного больше.Что еще мы можем узнать, исследуя уравнение x = x0 + v0t + 12at2? X = x0 + v0t + 12at2? Мы видим следующие отношения:
- Смещение зависит от квадрата истекшего времени, когда ускорение не равно нулю. В примере 3.8 драгстер преодолевает только четверть общего расстояния за первую половину прошедшего времени.
- Если ускорение равно нулю, то начальная скорость равна средней скорости (v0 = v -) (v0 = v–), и x = x0 + v0t + 12at2becomesx = x0 + v0t.x = x0 + v0t + 12at2becomesx = x0 + v0t.
Расчет конечной скорости на основе расстояния и ускорения
Четвертое полезное уравнение может быть получено путем другой алгебраической обработки предыдущих уравнений. Если мы решим v = v0 + atv = v0 + at для t , мы получим
Подставляя это и v– = v0 + v2v– = v0 + v2 в x = x0 + v – tx = x0 + v – t, получаем
v2 = v02 + 2a (x − x0) (constanta). v2 = v02 + 2a (x − x0) (constanta).3,14
Пример 3.9
Расчет конечной скорости
Рассчитайте конечную скорость драгстера в Примере 3.8 без использования информации о времени.Стратегия
Уравнение v2 = v02 + 2a (x − x0) v2 = v02 + 2a (x − x0) идеально подходит для этой задачи, поскольку оно связывает скорости, ускорение и смещение и не требует информации о времени.Решение
Сначала мы идентифицируем известные значения. Мы знаем, что v 0 = 0, поскольку драгстер запускается из состояния покоя. Мы также знаем, что x — x 0 = 402 м (это был ответ в примере 3.8). Среднее ускорение было равно , = 26.0 м / с 2 .Во-вторых, мы подставляем известные значения в уравнение v2 = v02 + 2a (x − x0) v2 = v02 + 2a (x − x0) и решаем относительно v :
v2 = 0 + 2 (26,0 м / с2) (402 м). v2 = 0 + 2 (26,0 м / с2) (402 м).Таким образом,
v2 = 2,09 × 104 м2 / с2 v = 2,09 × 104 м2 / с2 = 145 м / с. v2 = 2,09 × 104 м2 / с2v = 2,09 × 104 м2 / с2 = 145 м / с.Значение
Скорость 145 м / с составляет около 522 км / ч или около 324 миль / ч, но даже эта головокружительная скорость не достигает рекорда для четверти мили. Также обратите внимание, что квадратный корень имеет два значения; мы взяли положительное значение, чтобы указать скорость в том же направлении, что и ускорение.Изучение уравнения v2 = v02 + 2a (x − x0) v2 = v02 + 2a (x − x0) может дать дополнительное понимание общих соотношений между физическими величинами:
- Конечная скорость зависит от величины ускорения и расстояния, на котором оно действует.
- При фиксированном ускорении автомобиль, который едет вдвое быстрее, не просто останавливается на удвоенном расстоянии. Чтобы остановиться, нужно гораздо дальше. (Вот почему у нас есть зоны с пониженной скоростью возле школ.)
Объединение уравнений
В следующих примерах мы продолжаем исследовать одномерное движение, но в ситуациях, требующих немного большего количества алгебраических манипуляций.Примеры также дают представление о методах решения проблем. Следующее примечание предназначено для облегчения поиска необходимых уравнений. Имейте в виду, что эти уравнения не являются независимыми. Во многих ситуациях у нас есть два неизвестных, и нам нужно два уравнения из набора для решения неизвестных. Для решения данной ситуации нам нужно столько уравнений, сколько неизвестных.
Сводка кинематических уравнений (константа
a ) х = х0 + v0t + 12at2x = x0 + v0t + 12at2 v2 = v02 + 2a (x − x0) v2 = v02 + 2a (x − x0)Прежде чем мы перейдем к примерам, давайте более внимательно рассмотрим некоторые уравнения, чтобы увидеть поведение ускорения при экстремальных значениях.Переставляя уравнение 3.12, получаем
Из этого мы видим, что в течение конечного времени, если разница между начальной и конечной скоростями мала, ускорение невелико, приближаясь к нулю в пределе, когда начальная и конечная скорости равны. Напротив, в пределе t → 0t → 0 при конечной разности начальной и конечной скоростей ускорение становится бесконечным.
Аналогичным образом, переставляя уравнение 3.14, мы можем выразить ускорение в терминах скоростей и смещения:
а = v2-v022 (х-х0).а = v2-v022 (х-х0).Таким образом, при конечной разнице между начальной и конечной скоростями ускорение становится бесконечным, в пределе смещение приближается к нулю. Ускорение приближается к нулю в пределе, разница в начальной и конечной скоростях приближается к нулю для конечного смещения.
Пример 3.10
Как далеко уезжает машина?
На сухом бетоне автомобиль может ускоряться против движения со скоростью 7,00 м / с 2 , тогда как на мокром бетоне он может ускоряться противоположно движению со скоростью всего 5 м / с.00 м / с 2 . Найдите расстояния, необходимые для остановки автомобиля, движущегося со скоростью 30,0 м / с (около 110 км / ч) по (а) сухому бетону и (б) мокрому бетону. (c) Повторите оба вычисления и найдите смещение от точки, где водитель видит, что светофор становится красным, принимая во внимание время его реакции 0,500 с, чтобы нажать ногой на тормоз.Стратегия
Для начала нам нужно нарисовать набросок Рис. 3.22. Чтобы определить, какие уравнения лучше всего использовать, нам нужно перечислить все известные значения и точно определить, что нам нужно решить.Рис. 3.22. Пример эскиза для визуализации ускорения, противоположного движению и тормозному пути автомобиля.
Решение
- Во-первых, нам нужно определить известные и то, что мы хотим решить. Мы знаем, что v 0 = 30,0 м / с, v = 0 и a = −7,00 м / с 2 ( a отрицательно, потому что оно находится в направлении, противоположном скорости) . Возьмем x 0 равным нулю. Ищем смещение ΔxΔx, или x — x 0 .
Во-вторых, мы определяем уравнение, которое поможет нам решить проблему. Лучшее уравнение для использования — v2 = v02 + 2a (x − x0). v2 = v02 + 2a (x − x0). Это уравнение лучше всего, потому что оно включает только одно неизвестное, x . Нам известны значения всех других переменных в этом уравнении. (Другие уравнения позволили бы нам решить для x , но они требуют, чтобы мы знали время остановки, t , которое мы не знаем. Мы могли бы их использовать, но это потребовало бы дополнительных вычислений.)
В-третьих, мы изменим уравнение, чтобы найти x : x − x0 = v2 − v022ax − x0 = v2 − v022a и подставляем известные значения: х − 0 = 02− (30.0 м / с) 22 (-7,00 м / с2). X-0 = 02- (30,0 м / с) 22 (-7,00 м / с2). Таким образом, x = 64,3 м на сухом бетоне. x = 64,3 м на сухом бетоне. - Эта часть может быть решена точно так же, как (а). Единственное отличие состоит в том, что ускорение составляет −5,00 м / с 2 . Результат xwet = 90,0 м по мокрому бетону. xwet = 90,0 м по мокрому бетону.
- Когда водитель реагирует, тормозной путь такой же, как в (a) и (b) для сухого и влажного бетона. Итак, чтобы ответить на этот вопрос, нам нужно вычислить, как далеко проехал автомобиль за время реакции, а затем добавить это время ко времени остановки.Разумно предположить, что скорость остается постоянной в течение времени реакции водителя.
Для этого мы снова определяем известные и то, что мы хотим решить. Мы знаем, что v– = 30,0 м / sv– = 30,0 м / с, treaction = 0,500streaction = 0,500s и areaction = 0areaction = 0. Примем x0-реакцию x0-реакцию равной нулю. Ищем xreactionxreaction.
Во-вторых, как и раньше, мы определяем лучшее уравнение для использования. В этом случае x = x0 + v – tx = x0 + v – t работает хорошо, потому что единственное неизвестное значение — x , что мы и хотим найти.
В-третьих, мы подставляем известные для решения уравнения: x = 0 + (30,0 м / с) (0,500 с) = 15,0 м. x = 0 + (30,0 м / с) (0,500 с) = 15,0 м. Это означает, что автомобиль проезжает 15,0 м, в то время как водитель реагирует, в результате чего общее смещение в двух случаях с сухим и мокрым бетоном на 15,0 м больше, чем если бы он реагировал мгновенно.
Наконец, мы добавляем смещение во время реакции к смещению при торможении (рис. 3.23), xbraking + xreaction = xtotal, xbraking + xreaction = xtotal, и найдите (a) равным 64,3 м + 15,0 м = 79.3 м в сухом состоянии и (b) должно составлять 90,0 м + 15,0 м = 105 м во влажном состоянии.
Рис. 3.23. Расстояние, необходимое для остановки автомобиля, сильно различается в зависимости от дорожных условий и времени реакции водителя. Здесь показаны значения тормозного пути для сухого и мокрого покрытия, рассчитанные в этом примере для автомобиля, движущегося со скоростью 30,0 м / с. Также показаны общие расстояния, пройденные от точки, когда водитель впервые видит, что свет загорается красным, при условии, что время реакции составляет 0,500 с.
Значение
Смещения, обнаруженные в этом примере, кажутся разумными для остановки быстро движущегося автомобиля.Остановка автомобиля на мокром асфальте должна длиться дольше, чем на сухом. Интересно, что время реакции значительно увеличивает смещения, но более важен общий подход к решению проблем. Мы идентифицируем известные и определяемые величины, а затем находим соответствующее уравнение. Если существует более одного неизвестного, нам нужно столько независимых уравнений, сколько неизвестных необходимо решить. Часто есть несколько способов решить проблему. Фактически, различные части этого примера могут быть решены другими методами, но представленные здесь решения являются самыми короткими.Пример 3.11
Время расчета
Предположим, автомобиль въезжает в движение по автостраде на съезде длиной 200 м. Если его начальная скорость равна 10,0 м / с, а он ускоряется со скоростью 2,00 м / с 2 , сколько времени потребуется автомобилю, чтобы преодолеть 200 м по рампе? (Такая информация может быть полезна транспортному инженеру.)Стратегия
Сначала мы рисуем набросок Рис. 3.24. Нам предлагается решить за время т . Как и раньше, мы идентифицируем известные величины, чтобы выбрать удобную физическую связь (то есть уравнение с одной неизвестной, t .)Рис. 3.24. Эскиз автомобиля, ускоряющегося на съезде с автострады.
Решение
Опять же, мы определяем известные и то, что мы хотим решить. Мы знаем, что x0 = 0, x0 = 0,v0 = 10 м / с, a = 2,00 м / с2v0 = 10 м / с, a = 2,00 м / с2 и x = 200 м.
Нам нужно решить для т . Уравнение x = x0 + v0t + 12at2x = x0 + v0t + 12at2 работает лучше всего, потому что единственной неизвестной в уравнении является переменная t , которую нам нужно решить. Из этого понимания мы видим, что когда мы вводим известные значения в уравнение, мы получаем квадратное уравнение.
Нам нужно изменить уравнение, чтобы найти t , затем подставив известные значения в уравнение:
200 м = 0 м + (10,0 м / с) t + 12 (2,00 м / с2) t2. 200 м = 0 м + (10,0 м / с) t + 12 (2,00 м / с2) t2.Затем мы упрощаем уравнение. Единицы измерения отменяются, потому что они есть в каждом члене. Мы можем получить единицы секунд для отмены, взяв t = t с, где t — величина времени, а s — единица измерения. Остается
Затем мы используем формулу корней квадратного уравнения, чтобы найти t ,
t2 + 10t − 200 = 0t = −b ± b2−4ac2a, t2 + 10t − 200 = 0t = −b ± b2−4ac2a,, что дает два решения: t = 10.0 и t = −20,0. Отрицательное значение времени неразумно, так как это будет означать, что событие произошло за 20 секунд до начала движения. Мы можем отказаться от этого решения. Таким образом,
Значение
Всякий раз, когда уравнение содержит неизвестный квадрат, есть два решения. В некоторых проблемах имеют смысл оба решения; в других случаях разумно только одно решение. Ответ 10,0 с кажется разумным для типичной автострады на съезде.Проверьте свое понимание 3.5
Ракета ускоряется со скоростью 20 м / с. 2 во время пуска.Сколько времени нужно, чтобы ракета достигла скорости 400 м / с?
Пример 3.12
Ускорение космического корабля
Космический корабль покинул орбиту Земли и направляется к Луне. Разгоняется со скоростью 20 м / с 2 за 2 мин и преодолевает расстояние в 1000 км. Каковы начальная и конечная скорости космического корабля?Стратегия
Нас просят найти начальную и конечную скорости космического корабля. Глядя на кинематические уравнения, мы видим, что одно уравнение не дает ответа.Мы должны использовать одно кинематическое уравнение для решения одной из скоростей и подставить его в другое кинематическое уравнение, чтобы получить вторую скорость. Таким образом, мы решаем два кинематических уравнения одновременно.Решение
Сначала мы решаем для v0v0, используя x = x0 + v0t + 12at2: x = x0 + v0t + 12at2: x − x0 = v0t + 12at2x − x0 = v0t + 12at21.0 × 106m = v0 (120.0s) +12 (20,0 м / с2) (120,0 с) 21,0 × 106 м = v0 (120,0 с) +12 (20,0 м / с2) (120,0 с) 2v0 = 7133,3 м / с. V0 = 7133,3 м / с.Затем мы подставляем v0v0 в v = v0 + atv = v0 + at, чтобы найти окончательную скорость:
v = v0 + at = 7133.3 м / с + (20,0 м / с2) (120,0 с) = 9533,3 м / с. V = v0 + at = 7133,3 м / с + (20,0 м / с2) (120,0 с) = 9533,3 м / с.Значение
Есть шесть переменных смещения, времени, скорости и ускорения, которые описывают движение в одном измерении. Начальные условия данной задачи могут быть множеством комбинаций этих переменных. Из-за такого разнообразия решения могут быть не такими простыми, как простая подстановка в одно из уравнений. Этот пример показывает, что решения кинематики могут потребовать решения двух одновременных кинематических уравнений.Освоив основы кинематики, мы можем перейти ко многим другим интересным примерам и приложениям. В процессе разработки кинематики мы также увидели общий подход к решению проблем, который дает как правильные ответы, так и понимание физических взаимоотношений. Следующий уровень сложности в наших задачах кинематики связан с движением двух взаимосвязанных тел, называемых задачами преследования двух тел .
Задачи преследования двух тел
До этого момента мы рассматривали примеры движения с участием одного тела.Даже для задачи с двумя автомобилями и тормозным путем на мокрой и сухой дороге мы разделили эту задачу на две отдельные задачи, чтобы найти ответы. В задаче преследования двух тел движения объектов связаны, то есть искомое неизвестное зависит от движения обоих объектов. Чтобы решить эти проблемы, мы пишем уравнения движения для каждого объекта, а затем решаем их одновременно, чтобы найти неизвестное. Это показано на Рисунке 3.25.
Рис. 3.25 Сценарий преследования с двумя телами, в котором автомобиль 2 имеет постоянную скорость, а автомобиль 1 идет сзади с постоянным ускорением.Автомобиль 1 догонит автомобиль 2 позже.
Время и расстояние, необходимое для того, чтобы автомобиль 1 догнал автомобиль 2, зависит от начального расстояния, на которое автомобиль 1 находится от автомобиля 2, а также от скорости обоих автомобилей и ускорения автомобиля 1. Кинематические уравнения, описывающие движение обоих автомобилей, должны быть решил найти эти неизвестные.
Рассмотрим следующий пример.
Пример 3.13
Гепард ловит газель
Гепард прячется за кустом. Гепард замечает пробегающую мимо газель со скоростью 10 м / с.В тот момент, когда газель проходит мимо гепарда, гепард из состояния покоя ускоряется со скоростью 4 м / с 2 , чтобы поймать газель. а) Сколько времени требуется гепарду, чтобы поймать газель? б) Что такое смещение газели и гепарда?Стратегия
Мы используем систему уравнений для постоянного ускорения, чтобы решить эту проблему. Поскольку есть два движущихся объекта, у нас есть отдельные уравнения движения, описывающие каждое животное. Но то, что связывает уравнения, — это общий параметр, который имеет одинаковое значение для каждого животного.Если мы внимательно рассмотрим проблему, становится ясно, что общим параметром для каждого животного является их положение x , позднее t . Поскольку оба они начинаются с x0 = 0x0 = 0, их смещения будут такими же в более позднее время t , когда гепард догонит газель. Если мы выберем уравнение движения, которое решает смещение для каждого животного, мы можем затем установить уравнения, равные друг другу, и решить для неизвестного, то есть времени.Решение
- Уравнение для газели: Газель имеет постоянную скорость, которая является ее средней скоростью, поскольку она не ускоряется.Поэтому мы используем уравнение 3.10 с x0 = 0x0 = 0: x = x0 + v – t = v – t. x = x0 + v – t = v – t. Уравнение для гепарда: гепард ускоряется из состояния покоя, поэтому мы используем уравнение 3.13 с x0 = 0x0 = 0 и v0 = 0v0 = 0: x = x0 + v0t + 12at2 = 12at2.x = x0 + v0t + 12at2 = 12at2. Теперь у нас есть уравнение движения для каждого животного с общим параметром, который можно исключить, чтобы найти решение. В этом случае мы решаем для t : x = v – t = 12at2t = 2v – a.x = v – t = 12at2t = 2v – a. Газель имеет постоянную скорость 10 м / с, что составляет ее среднюю скорость.Ускорение гепарда 4 м / с 2 . Оценив т , время, за которое гепард достигнет газели, имеем t = 2v – a = 2 (10 м / с) 4m / s2 = 5s. t = 2v – a = 2 (10 м / с) 4m / s2 = 5s.
- Чтобы получить смещение, мы используем уравнение движения гепарда или газели, поскольку оба они должны дать одинаковый ответ.
Смещение гепарда: x = 12at2 = 12 (4 м / с2) (5) 2 = 50 м. x = 12at2 = 12 (4 м / с2) (5) 2 = 50 м. Водоизмещение газели: x = v – t = 10 м / с (5) = 50 м. x = v – t = 10 м / с (5) = 50 м.Мы видим, что оба смещения равны, как и ожидалось.
Значение
Важно анализировать движение каждого объекта и использовать соответствующие кинематические уравнения для описания отдельного движения. Также важно иметь хорошую визуальную перспективу задачи преследования двух тел, чтобы увидеть общий параметр, который связывает движение обоих объектов.Проверьте свое понимание 3.6
Велосипед имеет постоянную скорость 10 м / с. Человек начинает с отдыха и начинает бежать, чтобы догнать велосипед через 30 секунд, когда велосипед находится в том же положении, что и человек.Какое ускорение у человека?
Какие кинематические формулы?
Kinematic Equations: Целью этого первого раздела The Physics Classroom было исследование разнообразных средств, с помощью которых может быть описано движение объектов. Разнообразие представлений, которые мы исследовали, включает словесные представления, графические представления, числовые представления и графические представления (графики положения-времени и графики скорости-времени).
В Уроке 6 мы исследуем использование уравнений для описания и представления движения объектов. Эти уравнения известны как кинематические уравнения. Существует множество величин, связанных с движением объектов: смещение (и расстояние), скорость (и скорость), ускорение и время.
Что такое кинематические формулы?Знание каждой из этих величин дает описательную информацию о движении объекта. Например, если известно, что автомобиль движется с постоянной скоростью 22.0 м / с, север в течение 12,0 секунд для смещения на север на 264 метра, затем движение автомобиля полностью описывается. И если известно, что вторая машина ускоряется из положения покоя с ускорением на восток 3,0 м / с 2 в течение 8,0 секунд, обеспечивая конечную скорость 24 м / с, восток и смещение на восток 96 метров. , то полностью описывается движение этой машины.
Эти два утверждения дают полное описание движения объекта. Однако не всегда такая полнота известна.Часто бывает так, что известны лишь некоторые параметры движения объекта, а остальные неизвестны. Например, приближаясь к светофору, вы можете узнать, что ваша машина имеет скорость 22 м / с, восток, и способна к заносу 8,0 м / с 2 , запад.
Однако вы не знаете, какое смещение испытает ваша машина, если бы вы резко нажали на тормоз и занесло до полной остановки; и вы не знаете, сколько времени потребуется, чтобы остановиться. В таком случае неизвестные параметры могут быть определены с использованием принципов физики и математических уравнений (кинематических уравнений)
4 кинематических уравнения
Кинематика — это изучение движущихся объектов и их взаимосвязей.Есть четыре (4) кинематических уравнения, которые относятся к смещению D, скорости v, времени t и ускорению a.
a) D = v i t + 1/2 при 2 b) (v i + v f ) / 2 = D / t
c) a = (v f — v i ) / t d) v f 2 = v i 2 + 2aD
D = смещение
a = ускорение
т = время
v f = конечная скорость
v i = начальная скорость
Какие 3 кинематических уравнения?
Если мы знаем три из этих пяти кинематических переменных — Δ x, t, v 0, v, a \ Delta x, t, v_0, v, a Δx, t, v0, v, adelta, x, запятая , t, запятая, v, начальный индекс, 0, конечный индекс, запятая, v, запятая, a — для объекта с постоянным ускорением мы можем использовать кинематическую формулу , см. ниже, чтобы найти одну из неизвестных переменных .
Сколько существует кинематических уравнений?
Четыре кинематических уравнения , описывающие движение объекта: В приведенных выше уравнениях используются различные символы. Каждый символ имеет свое особое значение. Символ d обозначает смещение объекта.
Для чего используются кинематические уравнения?
Кинематические уравнения можно использовать для расчета различных аспектов движения, таких как скорость, ускорение, смещение и время.
Список кинематических уравнений
Кинематические формулы — это набор формул, которые относятся к пяти кинематическим переменным, перечисленным ниже.
Большой 1.
четырехъядерный v = v0 + at1
v = v0 + at1,
точка, пробел, v, равно, v, начальный индекс, 0, конечный индекс, плюс, a, t
Большой 2.
четырехугольник {\ Delta x} = (\ dfrac {v + v_0} {2}) t2
Δx = (2v + v0) t2,
точка, пробел, дельта, x, равно, левая скобка, начальная дробь, v, плюс, v, начальный нижний индекс, 0, конечный нижний индекс, деление на, 2, конечная дробь, правая скобка, t
Большой 3.2 + 2а \ Дельта x4.
v2 = v02 + 2aΔx4,
точка, пробел, v, начальный надстрочный индекс, 2, конечный надстрочный индекс, равно, v, начальный подстрочный индекс, 0, конечный подстрочный индекс, начальный надстрочный индекс, 2, конечный надстрочный индекс, плюс, 2, a, дельта, x
Поскольку кинематические формулы являются точными только в том случае, если ускорение является постоянным в течение рассматриваемого интервала времени, мы должны быть осторожны, чтобы не использовать их при изменении ускорения. Кроме того, кинематические формулы предполагают, что все переменные относятся к одному и тому же направлению: по горизонтали xxx, по вертикали yyy и т. Д.2} g = 9,81s2m g, равно, 9, точка, 81, начальная дробь, m, деленная на, s, начальный верхний индекс, 2, конечный верхний индекс, конечная дробь.
Это и странно, и удачно, если вдуматься. Это странно, поскольку это означает, что большой валун будет ускоряться вниз с тем же ускорением, что и небольшой камешек, и, если его уронить с той же высоты, он одновременно ударится о землю.
Это удачно, поскольку нам не нужно знать массу снаряда при решении кинематических формул, поскольку свободно летящий объект будет иметь такую же величину ускорения, g = 9.2} ay = −9,81s2m a, начальный индекс, y, конечный индекс, равно, минус, 9, точка, 81, начальная дробь, m, деленное на, s, начальный верхний индекс, 2, конечный верхний индекс, конечная дробь для снаряд, когда мы подставляем кинематические формулы.
Физические кинематические уравнения
Кинематические уравнения — это набор из четырех уравнений, которые можно использовать для прогнозирования неизвестной информации о движении объекта, если известна другая информация. Уравнения можно использовать для любого движения, которое можно описать как движение с постоянной скоростью (ускорение 0 м / с / с) или движение с постоянным ускорением.Их нельзя использовать в течение какого-либо периода времени, в течение которого изменяется ускорение. Каждое из кинематических уравнений включает четыре переменные. Если известны значения трех из четырех переменных, то можно вычислить значение четвертой переменной. Таким образом, кинематические уравнения предоставляют полезные средства прогнозирования информации о движении объекта, если известна другая информация.
Например, если значение ускорения, а также начальное и конечное значения скорости буксирующего автомобиля известны, то смещение автомобиля и время можно предсказать с помощью кинематических уравнений.Урок 6 этого модуля будет посвящен использованию кинематических уравнений для прогнозирования числовых значений неизвестных величин для движения объекта.
Четыре кинематических уравнения, описывающие движение объекта:
В приведенных выше уравнениях используются различные символы. Каждый символ имеет свое особое значение. Символ d обозначает смещение объекта. Символ t обозначает время, в течение которого объект двигался. Символ обозначает ускорение объекта.А символ v обозначает скорость объекта; индекс i после v (как в v i ) указывает, что значение скорости является начальным значением скорости, а индекс f (как в v f ) указывает, что значение скорости является конечным значением скорости.
Каждое из этих четырех уравнений надлежащим образом описывает математическую связь между параметрами движения объекта. Таким образом, их можно использовать для прогнозирования неизвестной информации о движении объекта, если известна другая информация.В следующей части Урока 6 мы исследуем, как это сделать.
Читайте также: Формула линейной интерполяции
Основные кинематические уравнения
Кинематика — это исследование движения объектов без учета сил, вызывающих это движение. Эти знакомые уравнения позволяют студентам анализировать и предсказывать движение объектов, и студенты будут продолжать использовать эти уравнения на протяжении всего изучения физики. Твердое понимание этих уравнений и того, как их использовать для решения проблем, необходимо для успеха в физике.Эта статья представляет собой чисто математическое упражнение, предназначенное для быстрого обзора того, как уравнения кинематики выводятся с помощью алгебры.
Это упражнение ссылается на диаграмму на рис. 1, на которой ось x представляет время, а ось y представляет скорость. Диагональная линия представляет движение объекта, скорость которого изменяется с постоянной скоростью. Заштрихованная область (A 1 + A 2 ) представляет смещение объекта в течение интервала времени между t 1 и t 2 , в течение которого скорость объекта увеличилась с v 1 до v 2. .
В этом документе будут использоваться следующие переменные:
v = величина скорости объекта (метры в секунду, м / с)
v 1 = величина начальной скорости (метры на секунда, м / с) (в некоторых текстах это vi или v 0 )
v 2 = величина конечной скорости (метры в секунду, м / с) (в некоторых текстах это v f )
a = величина ускорения (в метрах в секунду в квадрате, м / с 2 )
s = вектор смещения, величина смещения — это расстояние,
s = │ s │ = d (векторы выделены жирным шрифтом; тот же символ, не выделенный жирным шрифтом, представляет величину вектора)
Δ указывает на изменение, например Δv = (v 2 –v 1 )
t = время
t 1 = начальное время
t 2 = Последний раз
